The GPS class constructs objects that represent a single GPS (Global Positioning System) receiver attached to the physical board. The receiver can be used to find current latitude, longitude, altitude, course and ground speed. GPS receivers get their signals from an array of 32 satellites orbiting the Earth at an altitude of 12,600 miles. In other words, you can use Johnny-Five to talk to things in outer space (Is that cool or what?)
Supported chipsets, modules and breakouts:
Any GPS Module that by default transmits NMEA sentences over serial at 9600bps should "just work". If your device automatically transmits NMEA sentences at a different baud rate, you can set a custom baud rate in the configuration options.
The universe of breakouts, modules, receivers and chip sets can be confusing. Just because you don't see your device listed here doesn't mean it won't work. If you have a device that is not explicitly listed here, open an issue with links to as much documentation you can find on your device and we will take a look. If you have a device not explicitly listed here and it works, please update our list above and add and example to the eg folder.
This list will continue to be updated as more component support is implemented and tested.
Parameters
General Options
Property Type Value/Description Default Required port string The microcontroller's serial port to use. io.SERIAL_PORT_IDs.DEFAULTno pins array { tx: ?, rx: ?[, onOff: ?]}none no breakout string The breakout or shield being used none no receiver string The receiver module being used none no chip string The chipset being used on the receiver module none no fixed integer The number of digits after the decimal 6 no baud integer The baud rate for communication over serial 9600 no frequency integer The frequency of updates in Hz 1 no Breakouts
Breakout Use With... ADAFRUIT_ULTIMATE_GPS Adafruit Ultimate GPS Breakout
Shape
| Property Name | Description | Read Only |
|---|---|---|
| latitude | Current latitude | Yes |
| longitude | Current longitude | Yes |
| altitude | Current altitude | Yes |
| sat | Satellite operation details {pdop, hdop, vdop} | Yes |
| course | Current course | Yes |
| speed | Current ground speed | Yes |
| time | Time of last fix | Yes |
Component Initialization
Default
// U-Blox NEO-6M
new five.GPS([11, 10]); // [RX, TX]
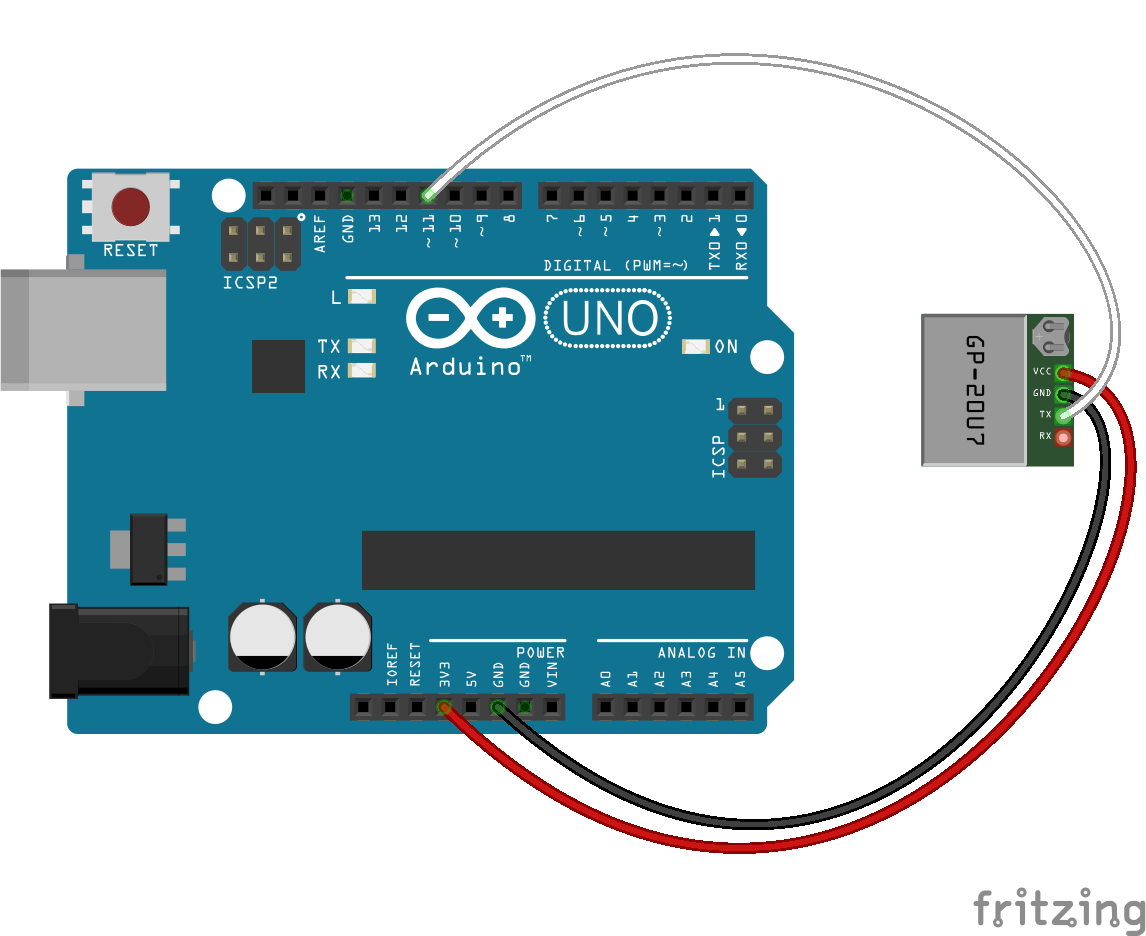
// GPS Receiver - GP-20U7 (56 Channel)
new five.GPS([11, 10]); // [RX, TX]
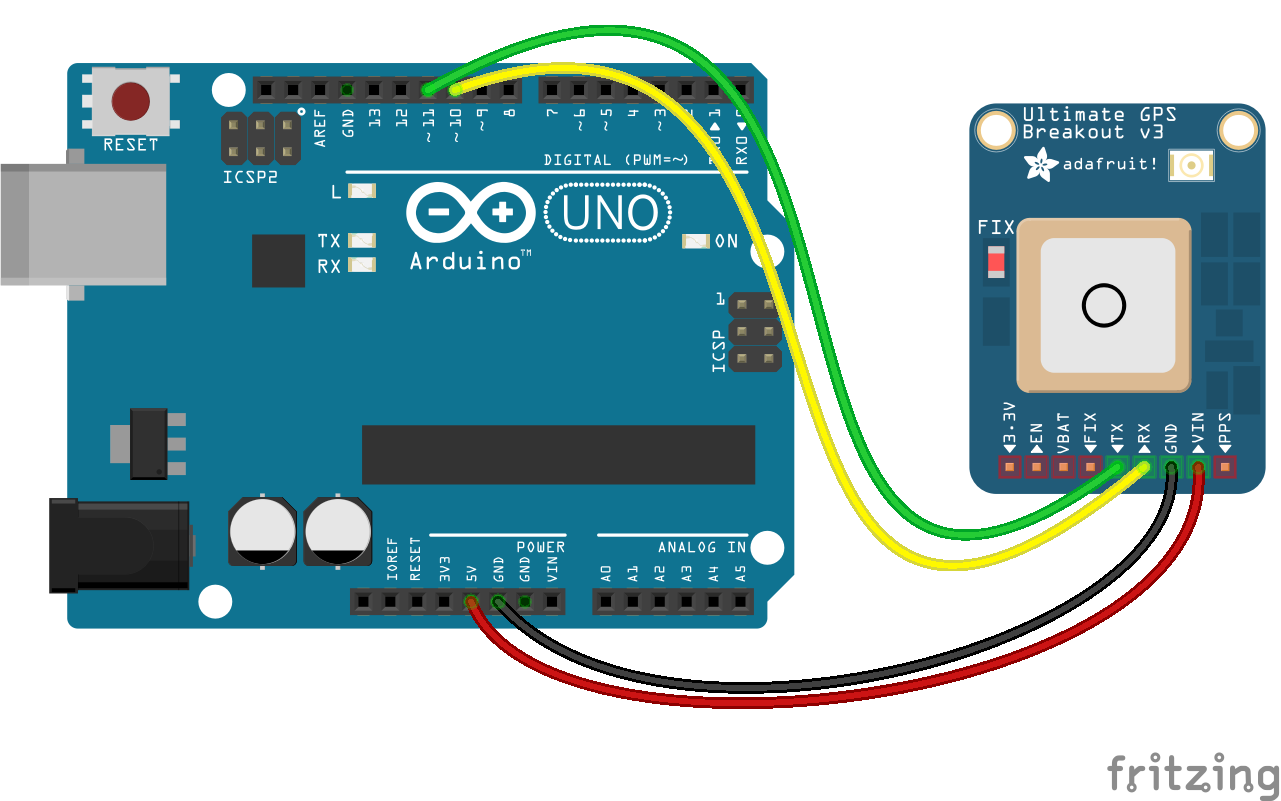
Adafruit Ultimate GPS Breakout
// Adafruit Ultimate GPS attached to Arduino UNO on Software Serial 0, pins 10 and 11
new five.GPS({
pins: [11, 10], // [RX, TX]
breakout: "ADAFRUIT_ULTIMATE_GPS"
});
Usage
- GPS Module connected to Arduino UNO with default buadrate which is 9600
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var gps = new five.GPS({
pins: {rx: 11, tx: 10}
});
// If latitude, longitude change log it
gps.on("change", function() {
console.log("position");
console.log(" latitude : ", this.latitude);
console.log(" longitude : ", this.longitude);
console.log(" altitude : ", this.altitude);
console.log("--------------------------------------");
});
// If speed, course change log it
gps.on("navigation", function() {
console.log("navigation");
console.log(" speed : ", this.speed);
console.log(" course : ", this.course);
console.log("--------------------------------------");
});
});
More Customize Usage
- GPS Module connected to Arduino MEGA 2560's hardware serial with custom buadrate which is 4800
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var gps = new five.GPS({
port: this.io.SERIAL_PORT_IDs.HW_SERIAL3,
baud: 4800
});
// If latitude, longitude change log it
gps.on("change", function() {
console.log("position");
console.log(" latitude : ", this.latitude);
console.log(" longitude : ", this.longitude);
console.log(" altitude : ", this.altitude);
console.log("--------------------------------------");
});
// If speed, course change log it
gps.on("navigation", function() {
console.log("navigation");
console.log(" speed : ", this.speed);
console.log(" course : ", this.course);
console.log("--------------------------------------");
});
});
API
sendCommand(commandString) Send a command to the GPS chipset. The checksum and CR/LF will be automatically appended.
var gps = new five.GPS([10,11]); // Warm reboot gps.sendCommand("$PMTK103");restart(coldRestart) Reboot the receiver. If coldRestart is true, all cached positioning data is flushed. If you do this, it could take up to 60 seconds to get a new fix.
var gps = new five.GPS([10,11]); // Warm reboot gps.restart();
Events
message A valid message (NMEA Sentence) was received from the GPS.
operations Satellite operating details have received.
acknowledge An "acknowledge" message was received from the GPS chipset.
unknown An valid but unrecognized message was received from the GPS chipset.
change The position has changed.
navigation The speed or direction has changed.
Notes on Serial
GPS is the first class in Johnny-Five to leverage firmata's new support for serial. Other IO plugins are following suit and adding their own support for serial.
Arduino Uno has a single UART. Assuming your Arduino is connected to a computer via USB, that UART is already in use. By default the GPS class will try and use software serial to connect but please note that software serial does not work reliably above 57600bps. Other boards such as Arduino MEGA 2560 has 4 UARTs so hardware serial is the better option on those boards.
Arduino boards that use the SAM and SAMD architectures (i.e. the Due and Zero) do not support Software Serial at all.
