The IMU class constructs objects that represent a single IMU module attached to the physical board. An IMU is an Inertial Measurement Unit. IMUs come in all shapes and DOFs (Degrees of Freedom). They are often made up of several components like Accelerometers, Gyros, Thermometer, and Compass/Magnetometers.
Supported modules:
This list will continue to be updated as more component support is implemented.
Parameters
General Options
Property Type Value/Description Default Required controller string BNO055, LSM303C, MPU6050. The Name of the controller to use "MPU6050" no MPU6050 Options(
controller: "MPU6050")Property Type Value/Description Default Required address Number 8-bit value. The address of the component (can be switched via ADO pin) 0x68no
Shape
Some of these properties may or may not exist depending on whether the IMU supports it.
| Property Name | Description | Read Only |
|---|---|---|
accelerometer | An instance of Accelerometer class. | Yes |
compass | An instance of Compass class. | Yes |
gyro | An instance of Gyro class. | Yes |
orientation | An instance of Orientiation class. | Yes |
thermometer | An instance of Thermometer class. | Yes |
Component Initialization
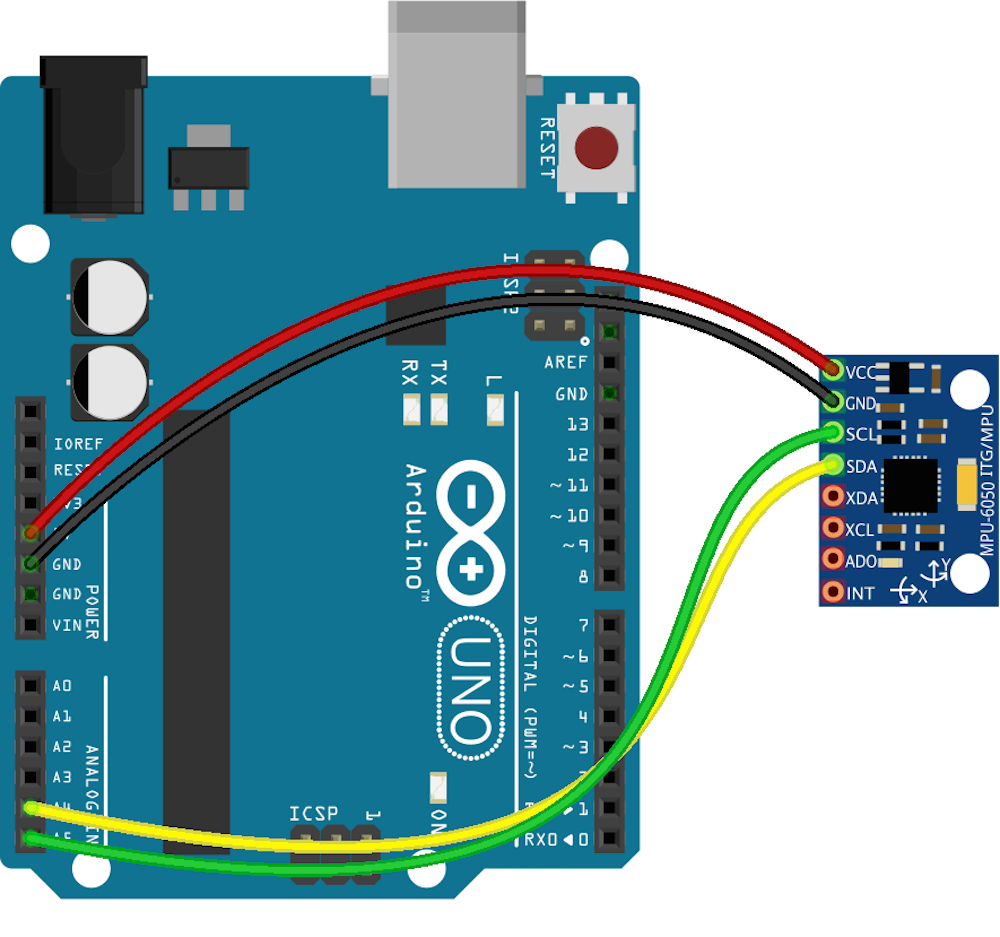
MPU6050
// Create an MPU-6050 IMU object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the MPU6050 controller
new five.IMU({
controller: "MPU6050",
address: 0x68, // optional
freq: 100 // optional
});
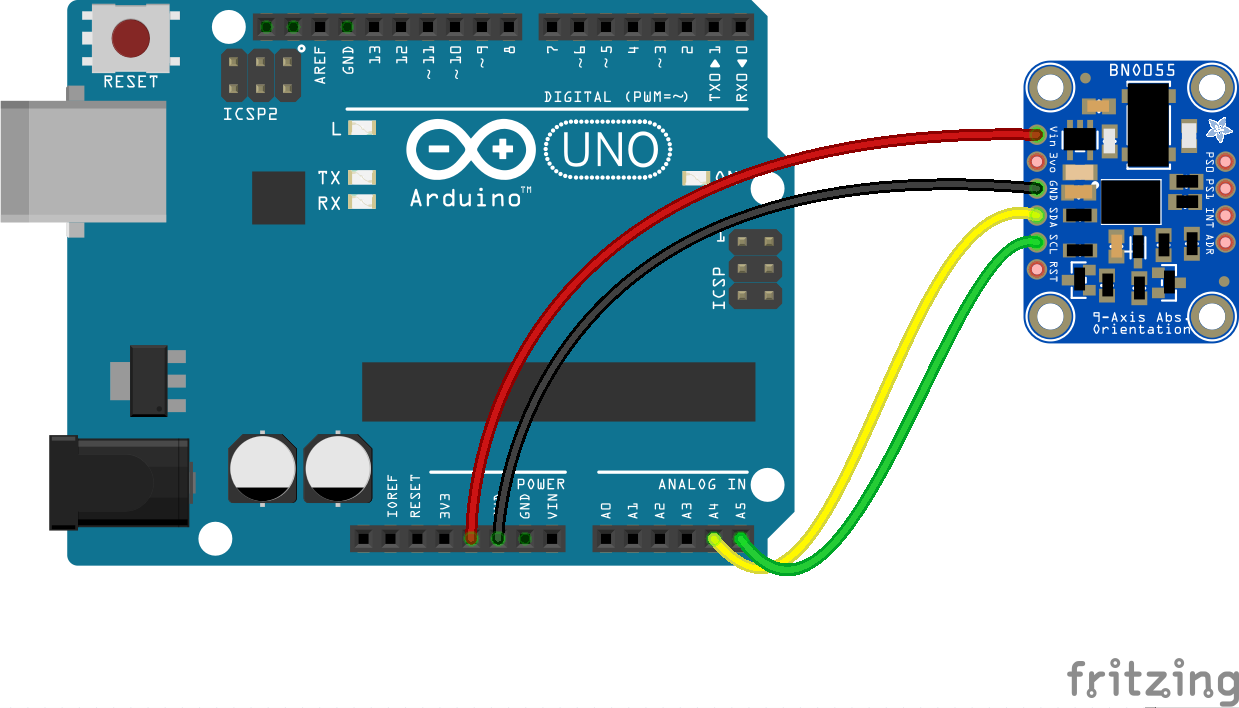
BNO055
// Create an BNO055 IMU object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the BNO055 controller
new five.IMU({
controller: "BNO055"
});
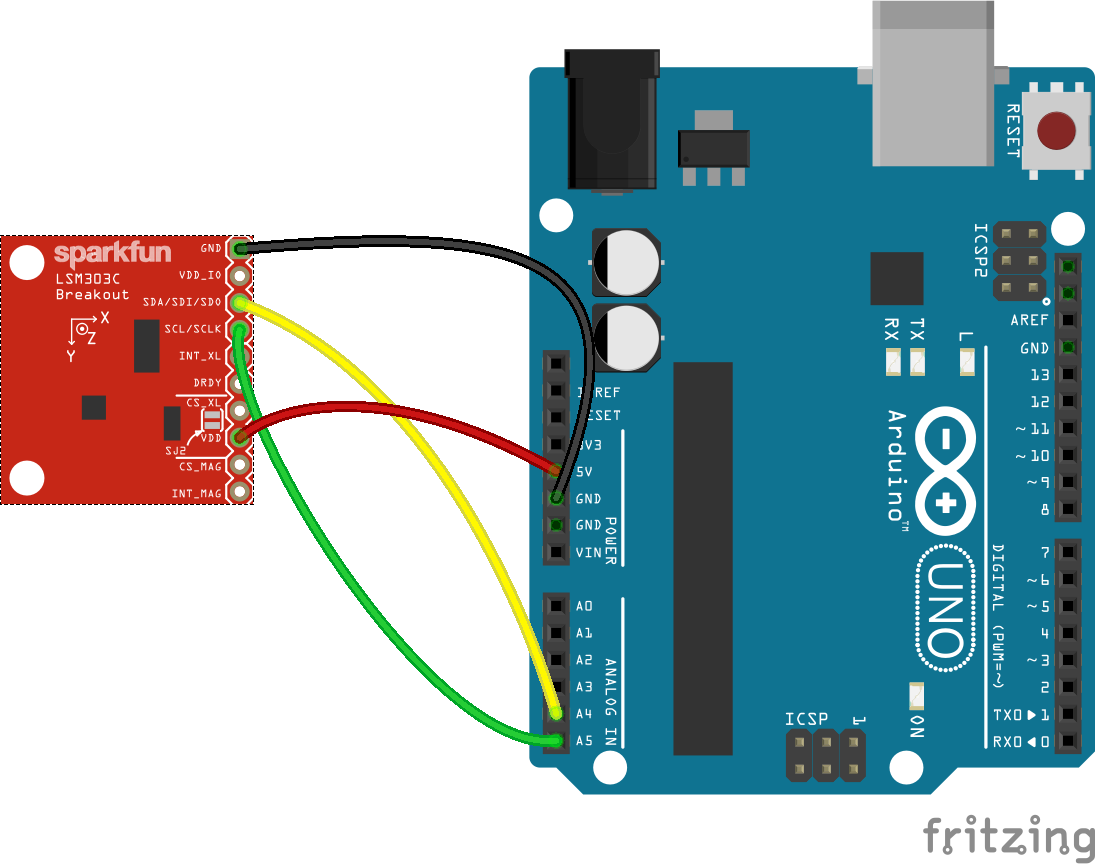
LSM303C
// Create an LSM303C IMU object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the LSM303C controller
new five.IMU({
controller: "LSM303C"
});
Usage
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var accelerometer = new five.IMU({
controller: "MPU6050"
});
accelerometer.on("data", function(err, data) {
console.log("Accelerometer: %d, %d, %d", this.accelerometer.x, this.accelerometer.z, this.accelerometer.z);
console.log("Gyro: %d, %d, %d", this.gyro.x, this.gyro.z, this.gyro.z);
console.log("Temperature: %d", this.temperature.celsius);
});
});
API
The IMU does not have an explicit API. Refer to the individual components for their APIs
Events
data The "data" event is fired as frequently as the user defined
freqwill allow in milliseconds.change The "change" event is fired whenever a corresponding "change" is fired from a component.
calibrated The "calibrated" event is fired whenever a corresponding "calibrated" is fired from a component.
