Breadboard for "IMU - BNO055"
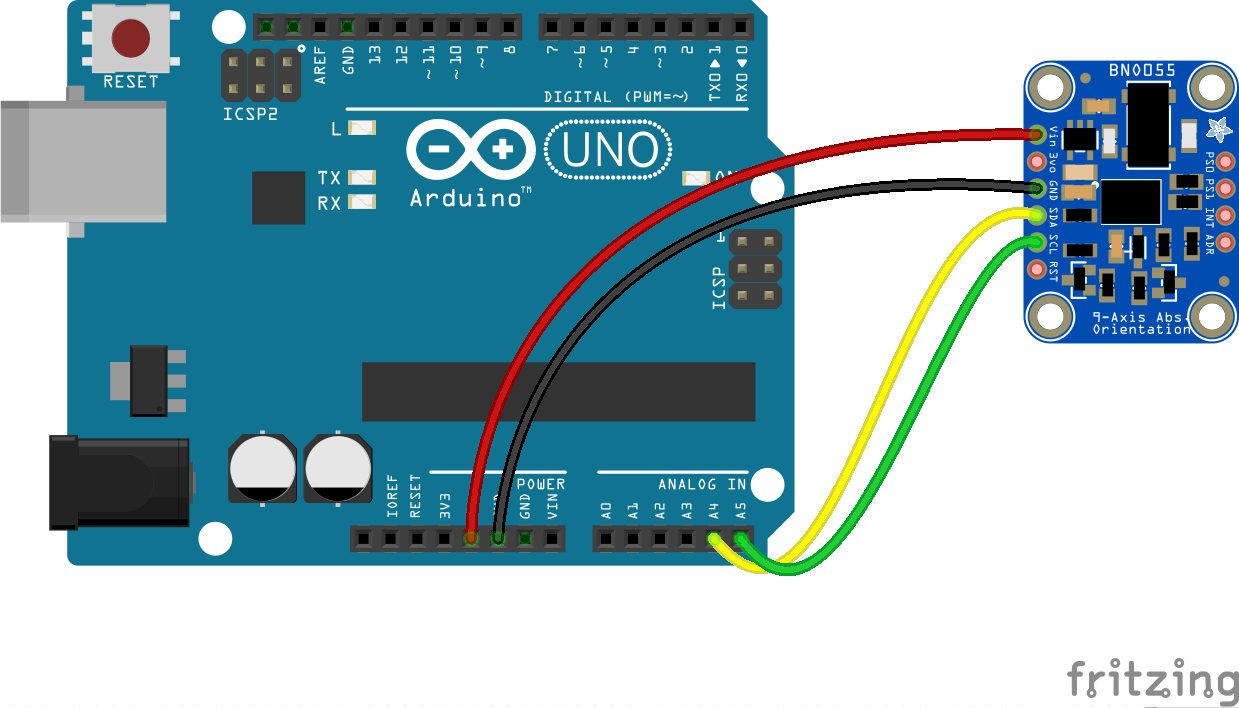
Fritzing diagram: imu-bno055.fzz
Run this example from the command line with:
node eg/imu-bno055.js
const {Board, IMU} = require("../");
const board = new Board();
board.on("ready", () => {
// Borrowed from
// https://github.com/adafruit/Adafruit_BNO055/blob/master/examples/bunny/bunny.ino
//
// Calibration: https://www.youtube.com/watch?v=uH7iQrH3GpA&feature=youtu.be
const layout = `
Board layout:
+----------+
| *| RST PITCH ROLL HEADING
ADR |* *| SCL
INT |* *| SDA ^ /->
PS1 |* *| GND | |
PS0 |* *| 3VO Y Z--> \-X
| *| VIN
+----------+
`;
console.log(layout);
const imu = new IMU({
controller: "BNO055"
});
imu.on("change", () => {
console.log("Thermometer");
console.log(" celsius : ", imu.thermometer.celsius);
console.log(" fahrenheit : ", imu.thermometer.fahrenheit);
console.log(" kelvin : ", imu.thermometer.kelvin);
console.log("--------------------------------------");
console.log("Accelerometer");
console.log(" x : ", imu.accelerometer.x);
console.log(" y : ", imu.accelerometer.y);
console.log(" z : ", imu.accelerometer.z);
console.log(" pitch : ", imu.accelerometer.pitch);
console.log(" roll : ", imu.accelerometer.roll);
console.log(" acceleration : ", imu.accelerometer.acceleration);
console.log(" inclination : ", imu.accelerometer.inclination);
console.log(" orientation : ", imu.accelerometer.orientation);
console.log("--------------------------------------");
console.log("Gyroscope");
console.log(" x : ", imu.gyro.x);
console.log(" y : ", imu.gyro.y);
console.log(" z : ", imu.gyro.z);
console.log(" pitch : ", imu.gyro.pitch);
console.log(" roll : ", imu.gyro.roll);
console.log(" yaw : ", imu.gyro.yaw);
console.log(" rate : ", imu.gyro.rate);
console.log(" isCalibrated : ", imu.gyro.isCalibrated);
console.log("--------------------------------------");
console.log("magnetometer");
console.log(" heading : ", Math.floor(imu.magnetometer.heading));
console.log(" bearing : ", imu.magnetometer.bearing.name);
console.log("--------------------------------------");
});
});
