Breadboard for "Accelerometer - MMA7361"
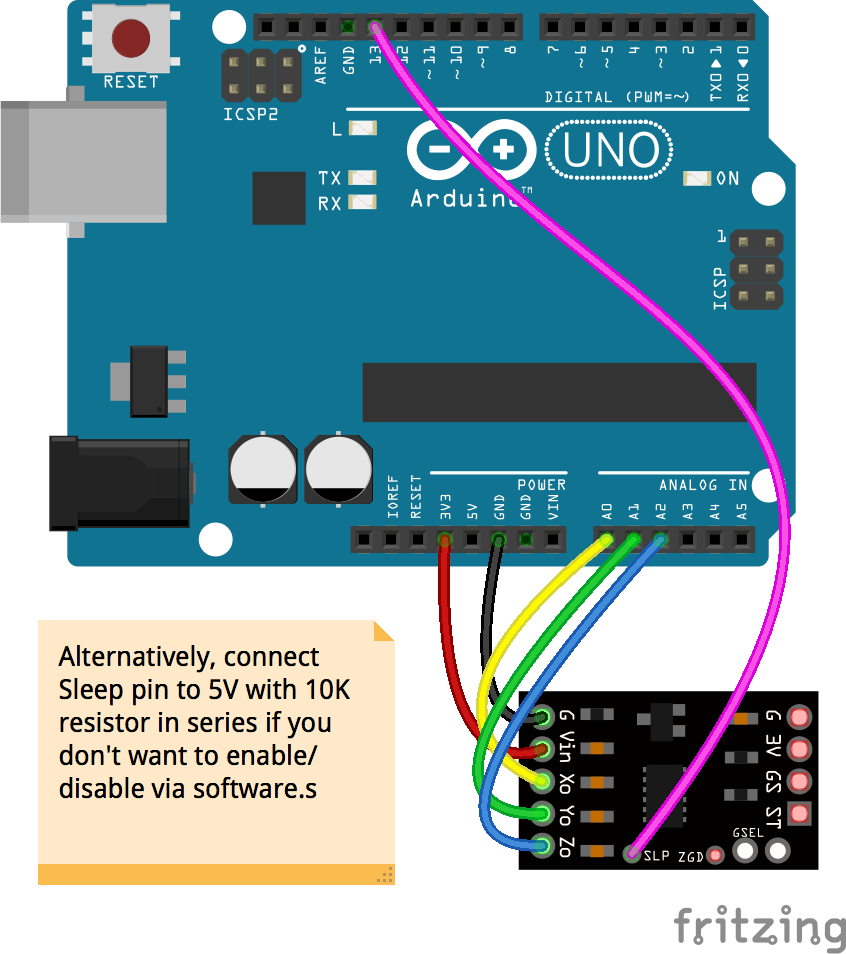
Fritzing diagram: accelerometer-mma7361.fzz
Run this example from the command line with:
node eg/accelerometer-mma7361.js
const { Accelerometer, Board } = require("johnny-five");
const board = new Board();
board.on("ready", () => {
// --- Sleep Pin
// The sleepPin is used to enable/disable the device and put it into sleep mode
// You can also tie the sleep pin to high with a 10k resistor and omit
// this option
// --- Calibration of zero-G readings (zeroV)
// This device also benefits from a calibration step. You can autoCalibrate
// by placing the device level on startup. You can also read the calibrated
// centers by reading the accelerometer.zeroV array after calibration. Subsequent
// initializations, you can omit the autoCalibrate and set the zeroV array
// in the options instead
const accelerometer = new Accelerometer({
controller: "MMA7361",
pins: ["A0", "A1", "A2"],
sleepPin: 13,
autoCalibrate: true
});
accelerometer.on("change", () => {
const {acceleration, inclination, orientation, pitch, roll, x, y, z} = accelerometer;
console.log("Accelerometer:");
console.log(" x : ", x);
console.log(" y : ", y);
console.log(" z : ", z);
console.log(" pitch : ", pitch);
console.log(" roll : ", roll);
console.log(" acceleration : ", acceleration);
console.log(" inclination : ", inclination);
console.log(" orientation : ", orientation);
console.log("--------------------------------------");
});
});
