Breadboard for "Motor - Sparkfun TB6612FNG"
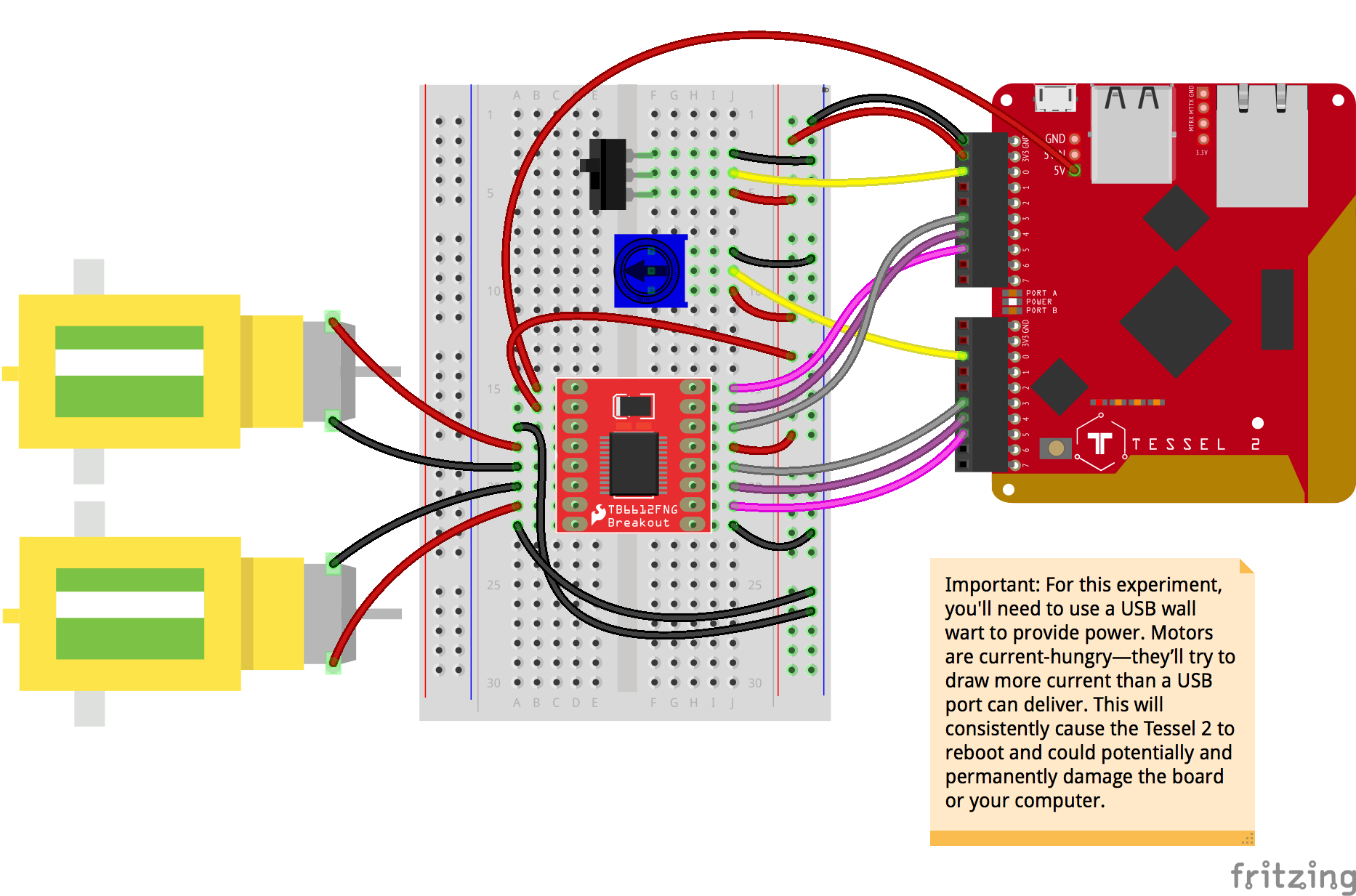
Fritzing diagram: motor-TB6612FNG.fzz
Run this example from the command line with:
node eg/motor-TB6612FNG.js
const {Board, Switch, Sensor, Motor} = require("johnny-five");
const Tessel = require("tessel-io");
const board = new Board({
io: new Tessel()
});
board.on("ready", () => {
const spdt = new Switch("a0");
const throttle = new Sensor("b0");
// See the comments below for more information about
// the pins shown in this pin array argument.
const motor = new Motor([ "a5", "a4", "a3" ]);
spdt.on("open", () => {
motor.stop().forward(motor.speed());
});
spdt.on("close", () => {
motor.stop().reverse(motor.speed());
});
throttle.on("change", () => {
motor.speed(throttle.value >> 2);
});
});
Additional Notes
Here's a breakdown of the pins used by these motor drivers, their corresponding Johnny-Five Motor class pin name, and capabilities:
| Control Type/Role | Johnny-Five Motor Pin Name | Breakout Printed Pin |
|---|---|---|
| PWM | pwm | PWMA or PWMB |
| Counter Direction | cdir | AIN2 or BIN2 |
| Direction | dir | AIN1 or BIN1 |
