Breadboard for "Motor"
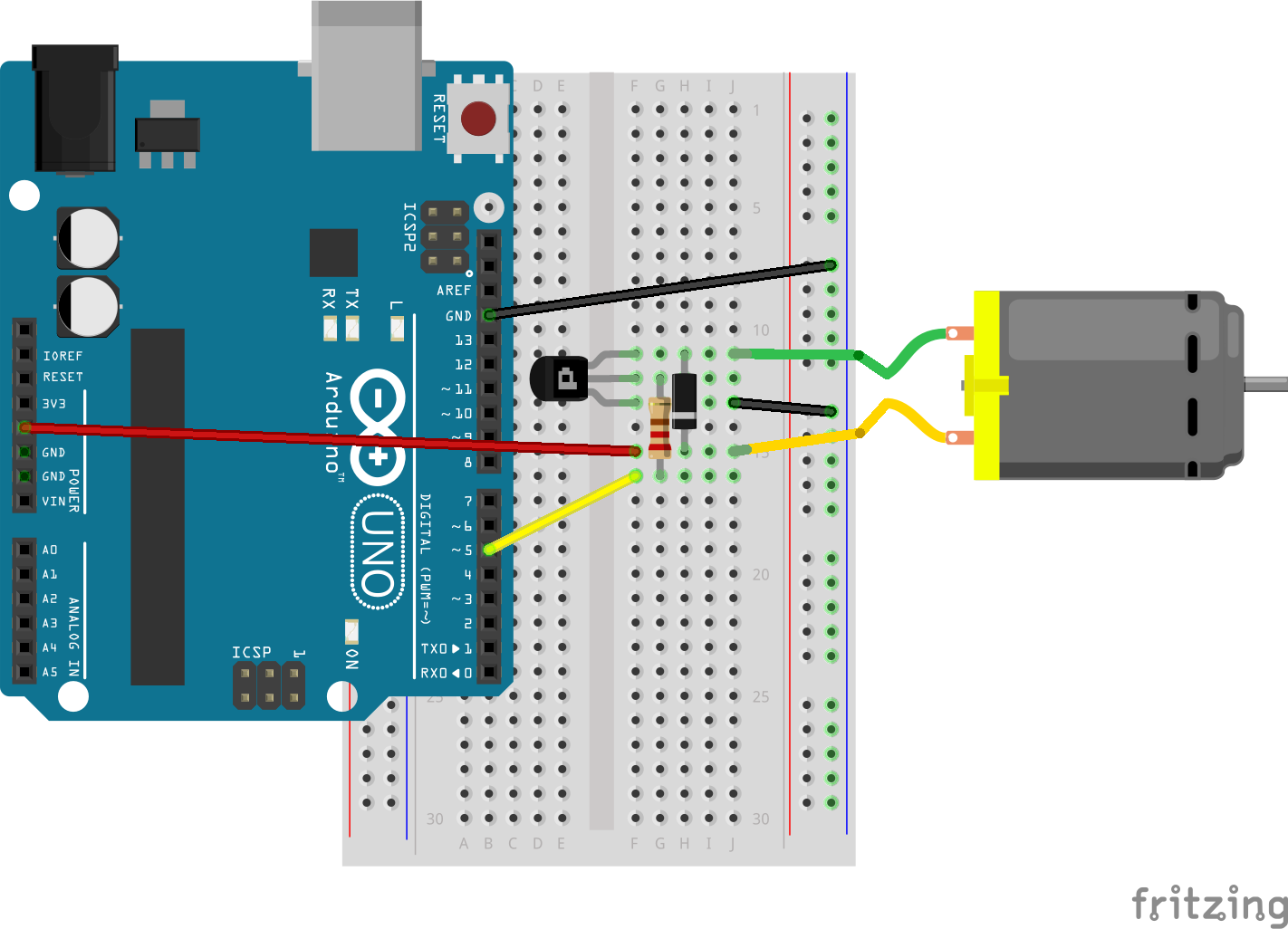
Fritzing diagram: motor.fzz
Run this example from the command line with:
node eg/motor.js
const {Board, Motor} = require("johnny-five");
const board = new Board();
board.on("ready", () => {
// Create a new `motor` hardware instance.
const motor = new Motor({
pin: 5
});
// Inject the `motor` hardware into
// the Repl instance's context;
// allows direct command line access
board.repl.inject({
motor
});
// Motor Event API
// "start" events fire when the motor is started.
motor.on("start", () => {
console.log(`start: ${Date.now()}`);
// Demonstrate motor stop in 2 seconds
board.wait(2000, motor.stop);
});
// "stop" events fire when the motor is stopped.
motor.on("stop", () => {
console.log(`stop: ${Date.now()}`);
});
// Motor API
// start([speed)
// Start the motor. `isOn` property set to |true|
// Takes an optional parameter `speed` [0-255]
// to define the motor speed if a PWM Pin is
// used to connect the motor.
motor.start();
// stop()
// Stop the motor. `isOn` property set to |false|
});
