Run this example from the command line with:
node eg/nodebot.js
var five, temporal, Nodebot;
five = require("johnny-five");
/**
* Any time-based scheduling
* should use temporal
*/
temporal = require("temporal");
/**
* Programs MUST initialize a serial
* communication "channel" with the board
* before executing hardware-specific code
*/
five.Board().on("ready", function() {
/**
* Initialize an instance of Nodebot
* with properties "right" and "left"
* whose values must correspond to the
* pin for each respective servo.
*/
Nodebot = new five.Nodebot({
right: 10,
left: 11
});
/**
* Inject Nodebot instance into REPL,
* this will allow a user to navigate
* and control the Nodebot via the
* command line
*/
this.repl.inject({
n: Nodebot
});
/**
* The following methods may be called
* from the "n" object on the command
* line to control/navigate the
* Nodebot.
*
* speed
* A number 1-5; 1 is slow, 5 is fast.
*
* n.fwd(speed)
* Drive the Nodebot forward at a
* specified speed.
*
* n.rev(speed)
* Drive the Nodebot in reverse at a
* specified speed.
*
* n.left(time = 500)
* Turn the Nodebot left for a
* specified amount of time in ms.
* Defaults to 500ms
*
* n.right(time = 500)
* Turn the Nodebot right for a
* specified amount of time in ms.
* Defaults to 500ms
*
* n.stop()
* Stop the Nodebot
*
* n.pivot(instruction)
* Pivot the Nodebot based on an
* instruction string.
* Instructions include:
* - "forward-right" or "f-r"
* - "forward-left" or "f-l"
* - "reverse-right" or "r-r"
* - "reverse-left" or "r-l"
*/
});
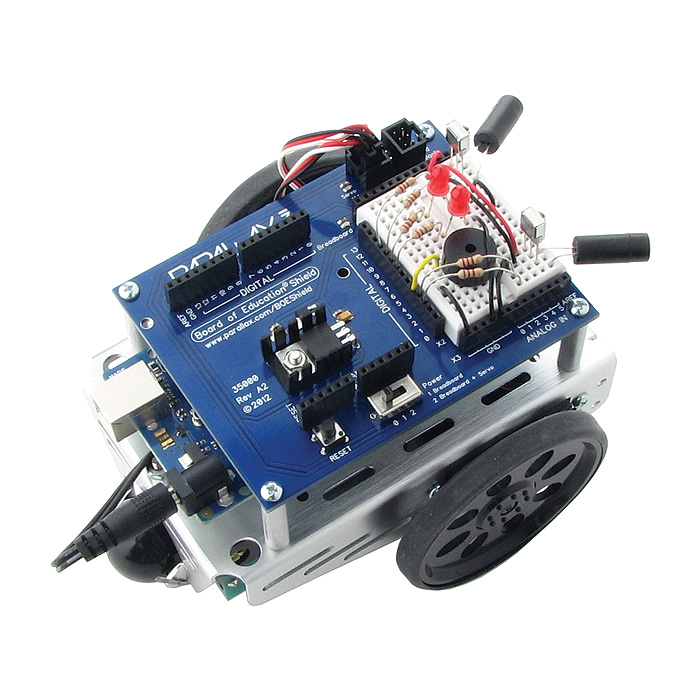
Illustrations / Photos
Complete Nodebot
Nodebots come in many flavors, but this is a typical setup.