Breadboard for "Motor - H-Bridge"
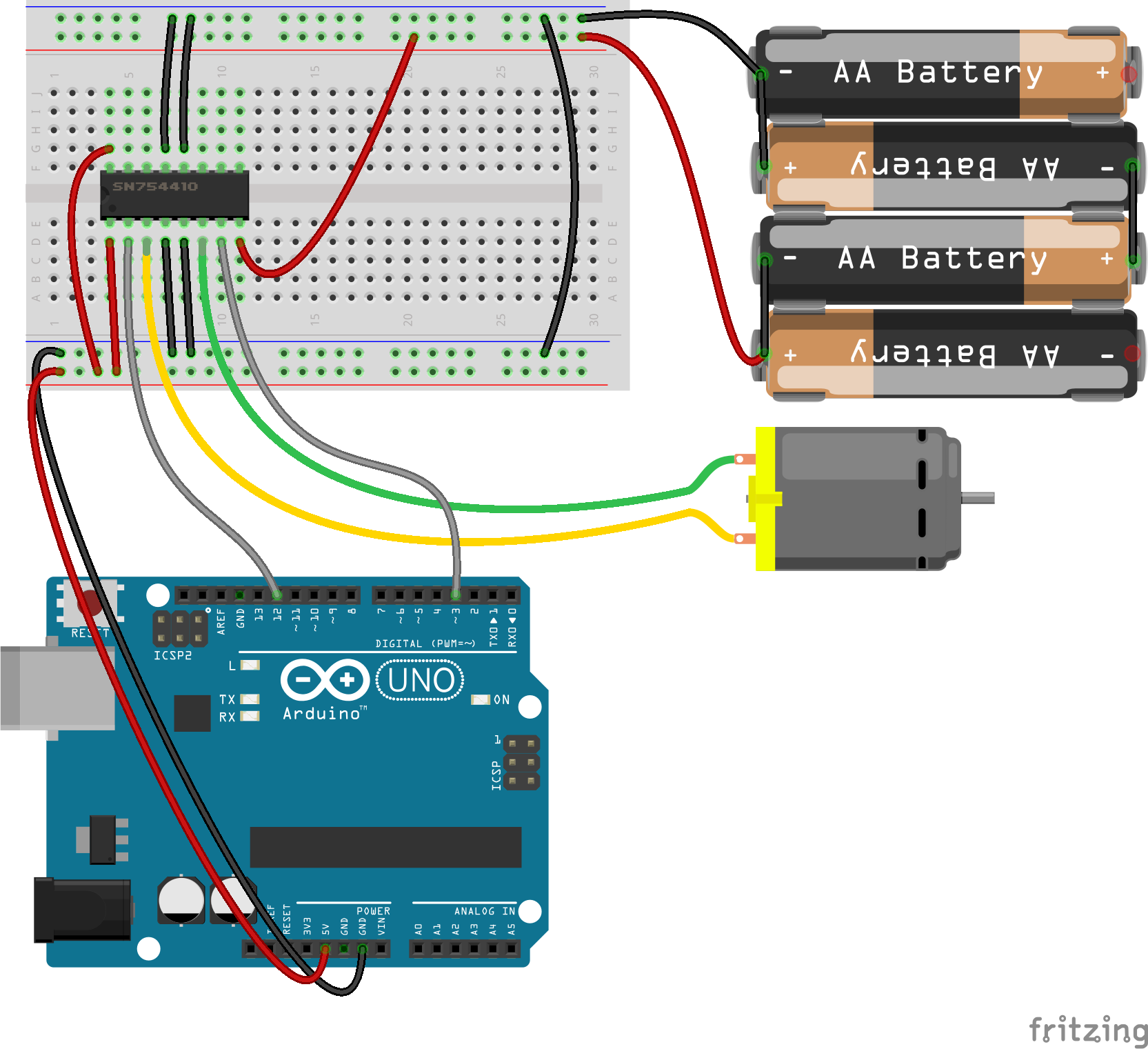
Fritzing diagram: motor-hbridge.fzz
Run this example from the command line with:
node eg/motor-hbridge.js
/*
IMPORTANT!!! This example is not intended for off the shelf H-Bridge
based motor controllers. Off the shelf controllers abstract away
the need to invert the PWM (AKA Speed) value when the direction pin
is set to high. This is for controllers that do not have that feature.
*/
const {Board, Motor} = require("johnny-five");
const board = new Board();
board.on("ready", () => {
/*
Motor A
pwm: 3
dir: 12
*/
const motor = new Motor({
pins: {
pwm: 3,
dir: 12
},
invertPWM: true
});
board.repl.inject({
motor
});
motor.on("start", () => {
console.log(`start: ${Date.now()}`);
});
motor.on("stop", () => {
console.log(`automated stop on timer: ${Date.now()}`);
});
motor.on("forward", () => {
console.log(`forward: ${Date.now()}`);
// demonstrate switching to reverse after 5 seconds
board.wait(5000, () => motor.reverse(255));
});
motor.on("reverse", () => {
console.log(`reverse: ${Date.now()}`);
// demonstrate stopping after 5 seconds
board.wait(5000, motor.stop);
});
// set the motor going forward full speed
motor.forward(255);
});
