Breadboard for "Accelerometer - MMA8452"
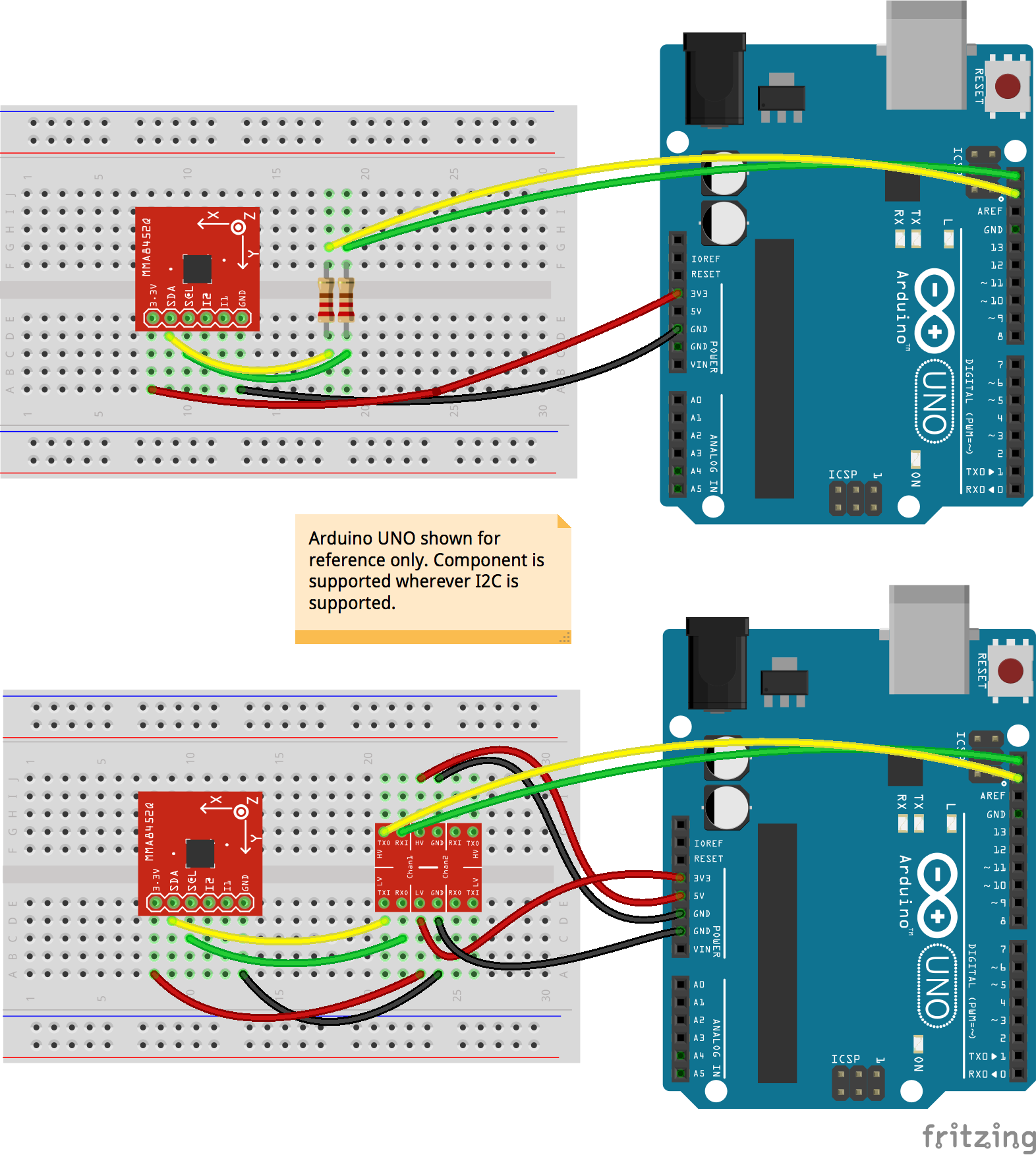
Fritzing diagram: accelerometer-MMA8452.fzz
Run this example from the command line with:
node eg/accelerometer-MMA8452.js
const { Accelerometer, Board } = require("johnny-five");
const board = new Board();
board.on("ready", () => {
const accelerometer = new Accelerometer({
controller: "MMA8452"
});
accelerometer.on("change", () => {
const {acceleration, inclination, orientation, pitch, roll, x, y, z} = accelerometer;
console.log("Accelerometer:");
console.log(" x : ", x);
console.log(" y : ", y);
console.log(" z : ", z);
console.log(" pitch : ", pitch);
console.log(" roll : ", roll);
console.log(" acceleration : ", acceleration);
console.log(" inclination : ", inclination);
console.log(" orientation : ", orientation);
console.log("--------------------------------------");
});
["tap", "tap:single", "tap:double"].forEach((event) => {
accelerometer.on(event, () => console.log(event));
});
});
