
The Gyro class constructs objects that represent a single Gyro sensor attached to the physical board.
We currently support two kinds of Gyros:
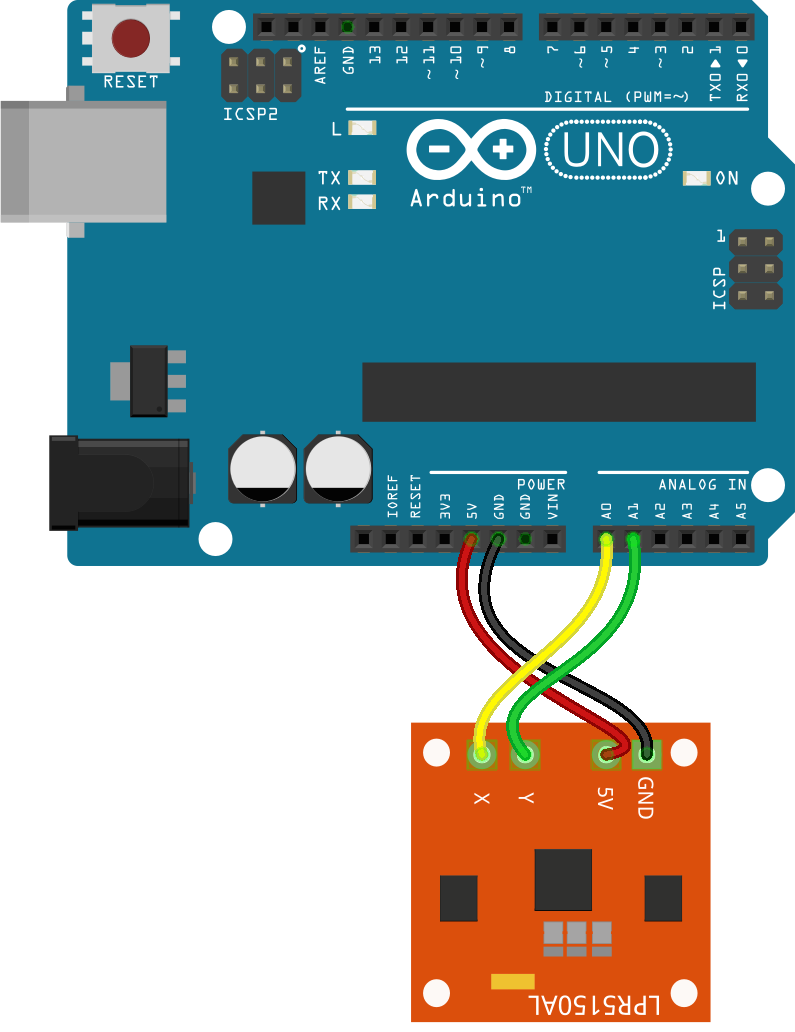
- LPR5150 (Analog)
- Used on the TinkerKit Gyro breakout
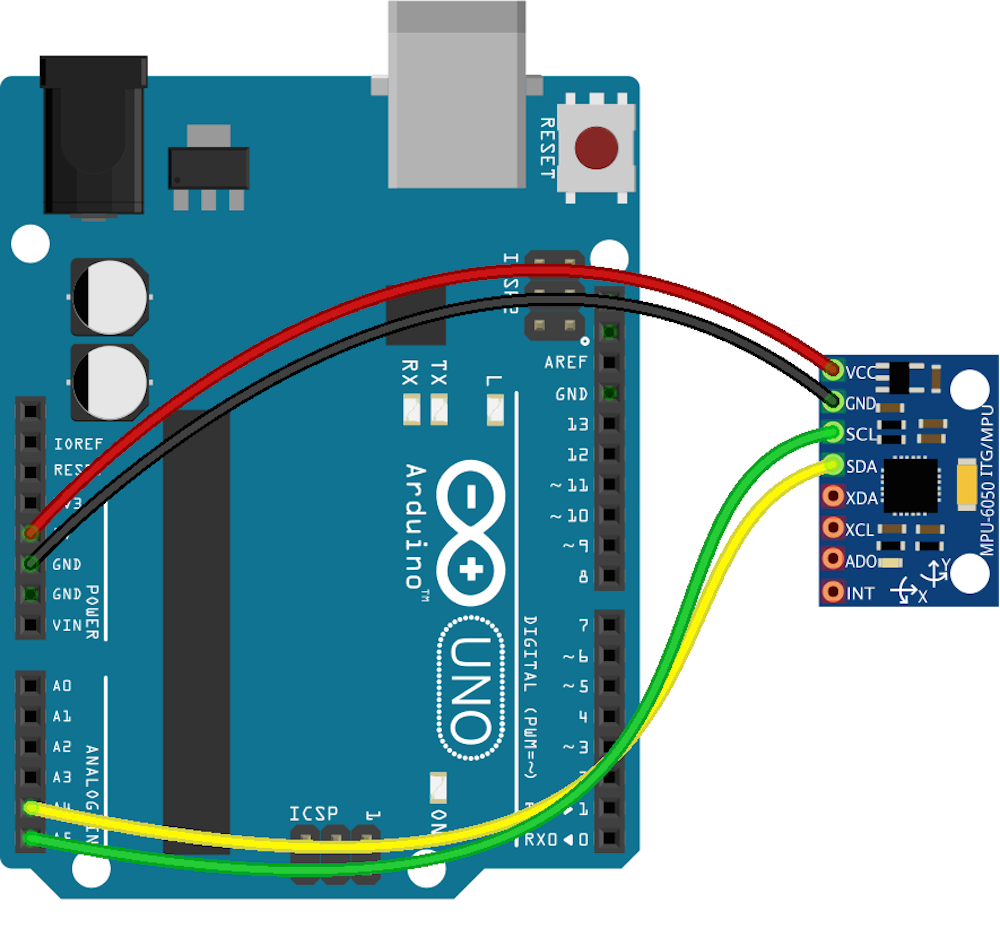
- MPU6050 (I2C)
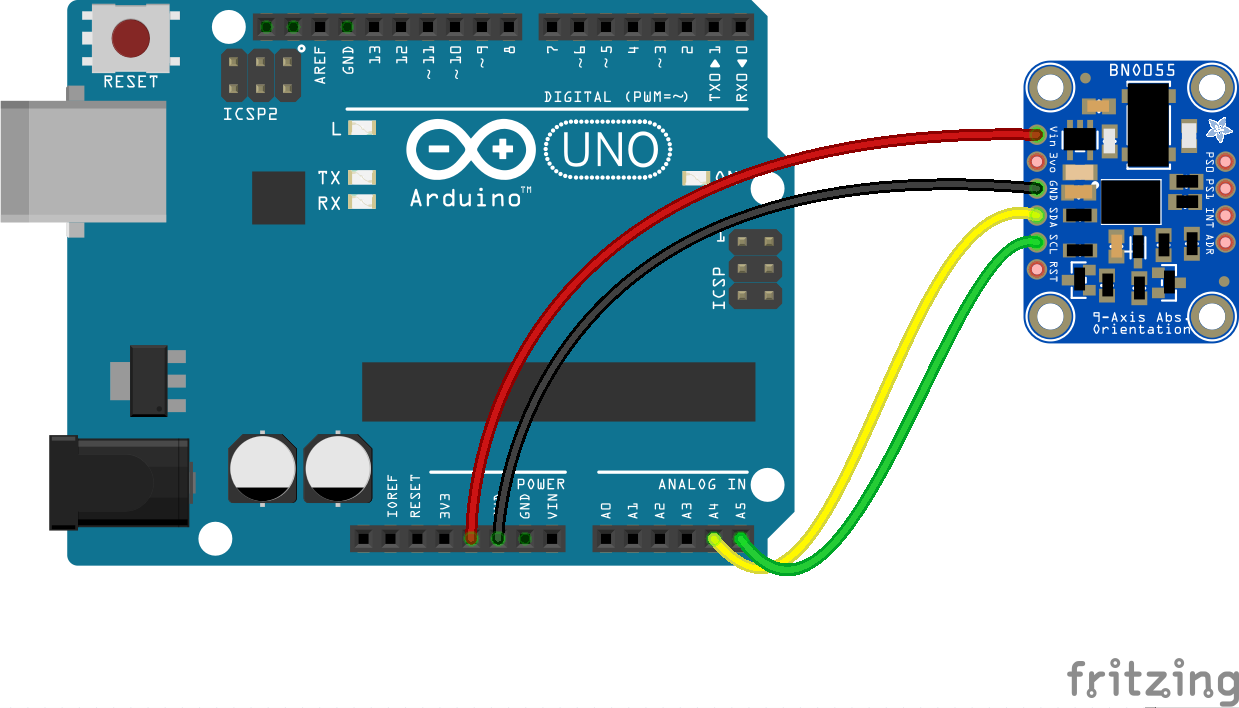
- BNO055
This list will continue to be updated as more Gyro devices are confirmed.
Parameters
General Options
Property Type Value/Description Default Required controller string "ANALOG", "MPU6050". The Name of the controller to use "ANALOG" no Analog Options (
controller: "ANALOG")Property Type Value/Description Default Required pins Array of Strings ["A*"]. The String analog pins that X, Y, and Z (optional) are attached toyes sensitivity Number Varies by device. For Tinkerkit, use Gyro.TK_4XorGyro.TK_1X. This value can be identified in the device's datasheet.yes resolution Number Varies by device. This value can be identified in the device's datasheet 4.88 no Digital Options
Property Type Value/Description Default Required address Hexadecimal Number Sets the Gyro's address on the I2C bus.
Varies by device.
For MPU-60500x68,0x69. For BNO0550x28,0x29.
Check the documentation for your Gyro for how to set its I2C address.Lowest value address first. no MPU6050 Options (
controller: "MPU6050")Property Type Value/Description Default Required sensitivity Number LSB/DegreesPerSecond. The sensitivity of the device. The MPU-6050 is currently configured at +/- 250 degrees per second 131 no
Shape
| Property Name | Description | Read Only |
|---|---|---|
id | A user definable id value. Defaults to a generated uid | No |
pins | The pins defined for X, Y, and Z. | No |
isCalibrated | The calibration state of the device. | Yes |
pitch | An object containing values for the pitch rate and angle. | Yes |
roll | An object containing values for the roll rate and angle. | Yes |
yaw | An object containing values for the yaw rate and angle. | Yes |
rate | And object containing the rate values of X, Y, and Z. | Yes |
x | Value of x axis. | Yes |
y | Value of y axis. | Yes |
z | Value of z axis. | Yes |
Component Initialization
Analog
// Analog Gyro:
//
// - attach X and Y to "A0" and "A1" respectively
// - Use the LPR5150AL 4X sensitivity rating
//
new five.Gyro({
pins: ["A0", "A1"],
sensitivity: 0.67, // optional
resolution: 4.88 // optional
});
MPU6050
// Create an MPU-6050 Gyro object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the MPU6050 controller
new five.Gyro({
controller: "MPU6050",
address: 0x68, // optional
sensitivity: 131 // optional
});
BNO055
// Create an BNO055 Gyro object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the BNO055 controller
new five.Gyro({
controller: "BNO055",
address: 0x28 // optional
});
Usage
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var gyro = new five.Gyro({
controller: "MPU6050"
});
gyro.on("change", function() {
console.log("gyro");
console.log(" x : ", this.x);
console.log(" y : ", this.y);
console.log(" z : ", this.z);
console.log(" pitch : ", this.pitch);
console.log(" roll : ", this.roll);
console.log(" yaw : ", this.yaw);
console.log(" rate : ", this.rate);
console.log(" isCalibrated : ", this.isCalibrated);
console.log("--------------------------------------");
});
});
API
- recalibrate() Tell the device to recalibrate
Events
change The "change" event is emitted whenever the value of the gyro changes more then the threshold value allows.
data The "data" event is fired as frequently as the user defined
freqwill allow in milliseconds. ("data" replaced the "read" event)
