The Accelerometer class constructs objects that represent a single Accelerometer sensor attached to the physical board.
Supported Accelerometers:
- Analog (Like the Tinkerkit 2/3-Axis Accelerometer)
- MPU6050 (I2C IMU)
- ADXL345 (I2C)
- LSM303C
This list will continue to be updated as more component support is implemented.
Parameters
General Options
Property Type Value/Description Default Required controller string ANALOG, MPU6050, ADXL345, ADXL335, MMA7361, LSM303C. The Name of the controller to use “ANALOG” no Analog Options (
controller: "ANALOG")Property Type Value/Description Default Required pins Array of Strings [“A*”]. The String analog pins that X, Y, and Z (optional) are attached to none yes sensitivity Number Varies by device. This value can be identified in the device's datasheet. 96 (Tinkerkit) no aref Number Voltage reference. This is the value of the VCC pin 5 no zeroV Number or Array 0-1023. The analog input when at rest, perpendicular to gravity. When an array, specifies the zeroV for the individual axes. 478 no autoCalibrate Boolean true,false. Whether to auto-calibrate thezeroVvalues. The device must be initialized with X/Y axes perpendicular to the earth, and the Z axis pointing to the sky.false no MPU6050 Options (
controller: "MPU6050")Property Type Value/Description Default Required sensitivity Number 16 bit value. The sensitivity for the +- 250 setting of this device 16384 no MMA7361 Options (
controller: "MMA7361")Property Type Value/Description Default Required sleepPin Number or String The digital pin that controls the sleep pin on the device. If you don't set this pin, you need to pull it up to Vcc with a 10k resistor. null no
Shape
| Property Name | Description | Read Only |
|---|---|---|
id | A user definable id value. Defaults to a generated uid | No |
zeroV | The current zeroV value (or values). May be different from initial values if auto-calibrated. | No |
pins | The pins defined for X, Y, and Z. | No |
pitch | The pitch angle in degrees. | Yes |
roll | The roll angle in degrees. | Yes |
x | Value of x axis in G forces. | Yes |
y | Value of y axis in G forces. | Yes |
z | Value of z axis in G forces. | Yes |
acceleration | The magnitude of the acceleration in G forces. | Yes |
inclination | The incline of the device in degrees. | Yes |
orientation | The orientation of the device (-3, -2, -1, 1, 2, 3). | Yes |
Component Initialization
Analog
Simplified array of X and Y axis pins, all defaults:
new five.Accelerometer(["A0", "A1"]);
Options object with pins property, array of X and Y axis pins, all defaults:
new five.Accelerometer({
pins: ["A0", "A1"]
});
Options object with pins property, array of X and Y axis pins:
new five.Accelerometer({
pins: ["A0", "A1"],
sensitivity: 96, // optional
aref: 5, // optional
zeroV: 478 // optional
});
// Create an analog Accelerometer object:
//
// - attach X and Y to "A0" and "A1" respectively
//
new five.Accelerometer({
pins: ["A0", "A1"],
sensitivity: 96, // optional
aref: 5, // optional
zeroV: 478 // optional
});
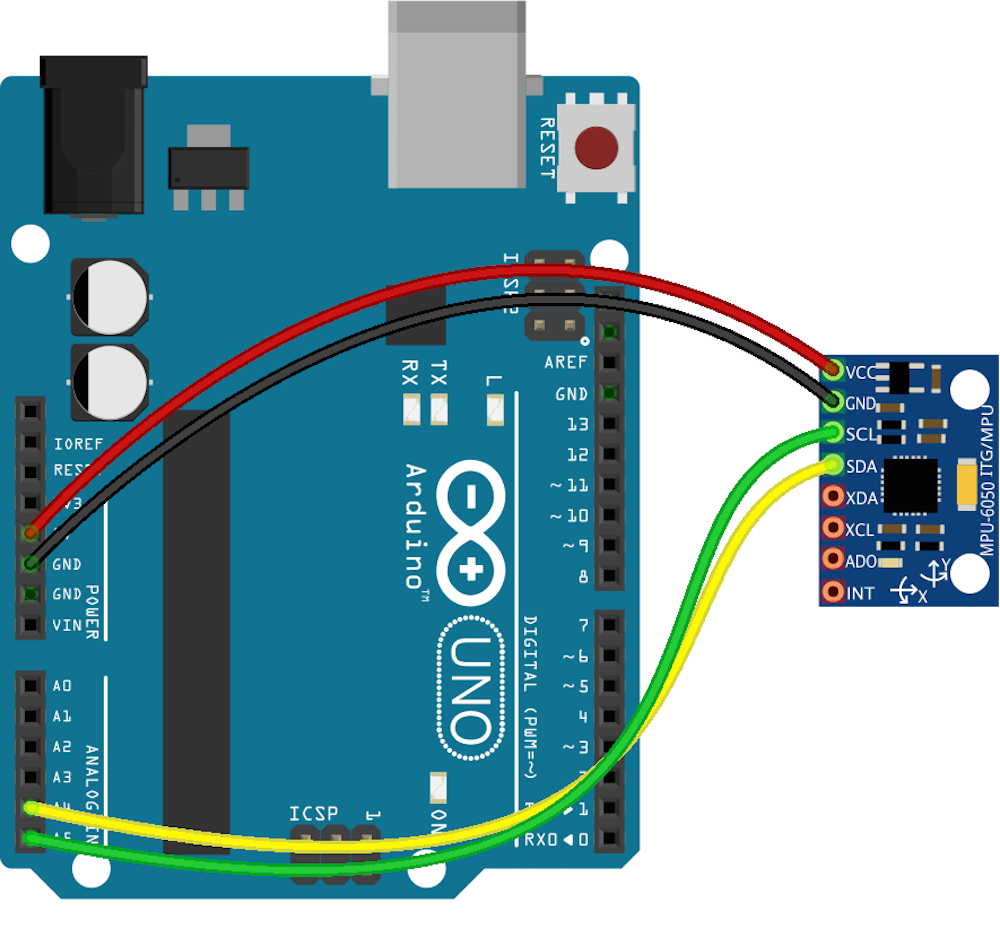
MPU6050
// Create an MPU-6050 Accelerometer object:
//
// - attach SDA and SCL to the I2C pins on
// your board (A4 and A5 for the Uno)
// - specify the MPU6050 controller
new five.Accelerometer({
controller: "MPU6050",
sensitivity: 16384 // optional
});
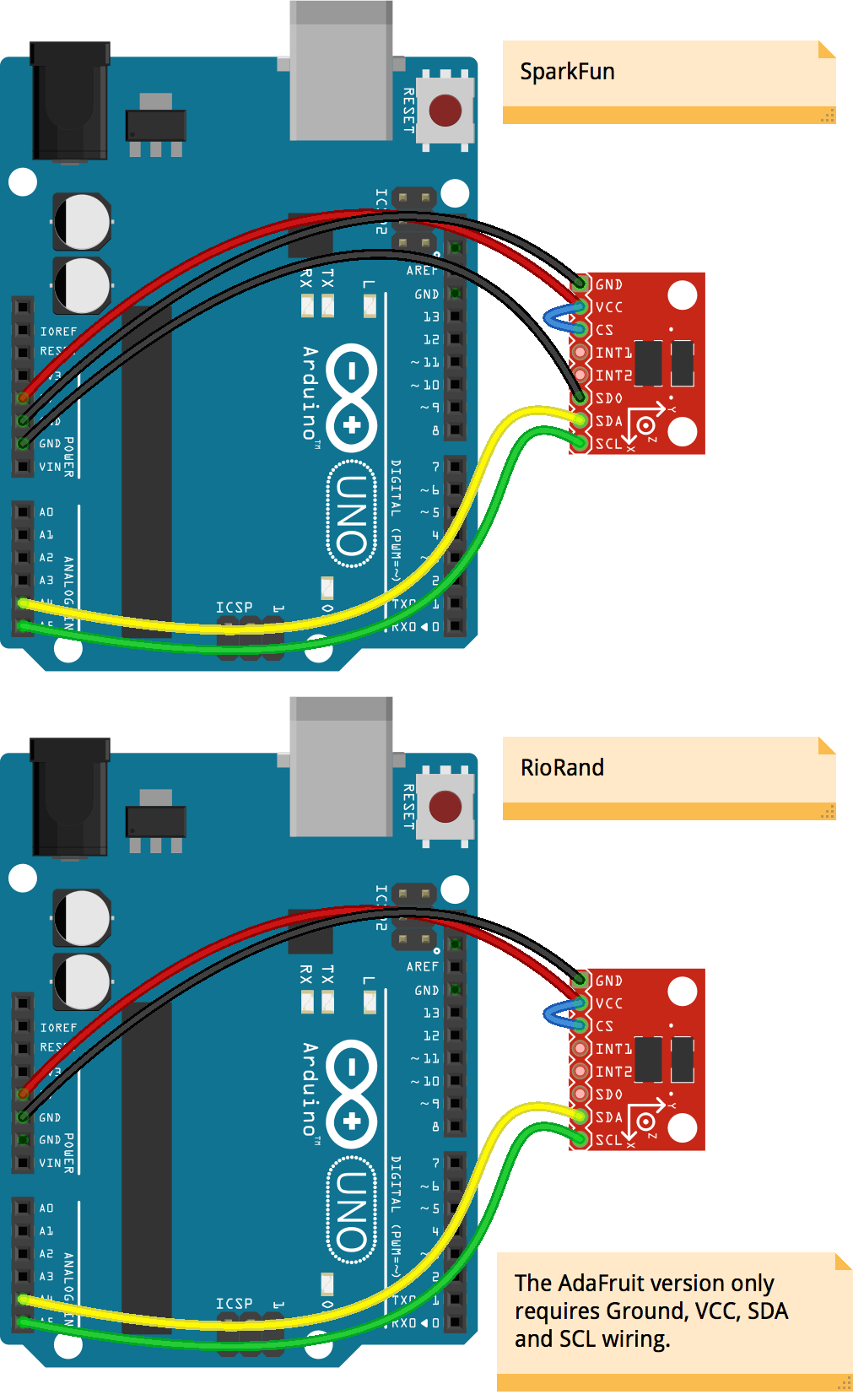
ADXL345
// Create an ADXL345 Accelerometer object:
//
// - attach SDA and SCL to the I2C pins on
// your board (A4 and A5 for the Uno)
// - specify the ADXL345 controller
new five.Accelerometer({
controller: "ADXL345"
});
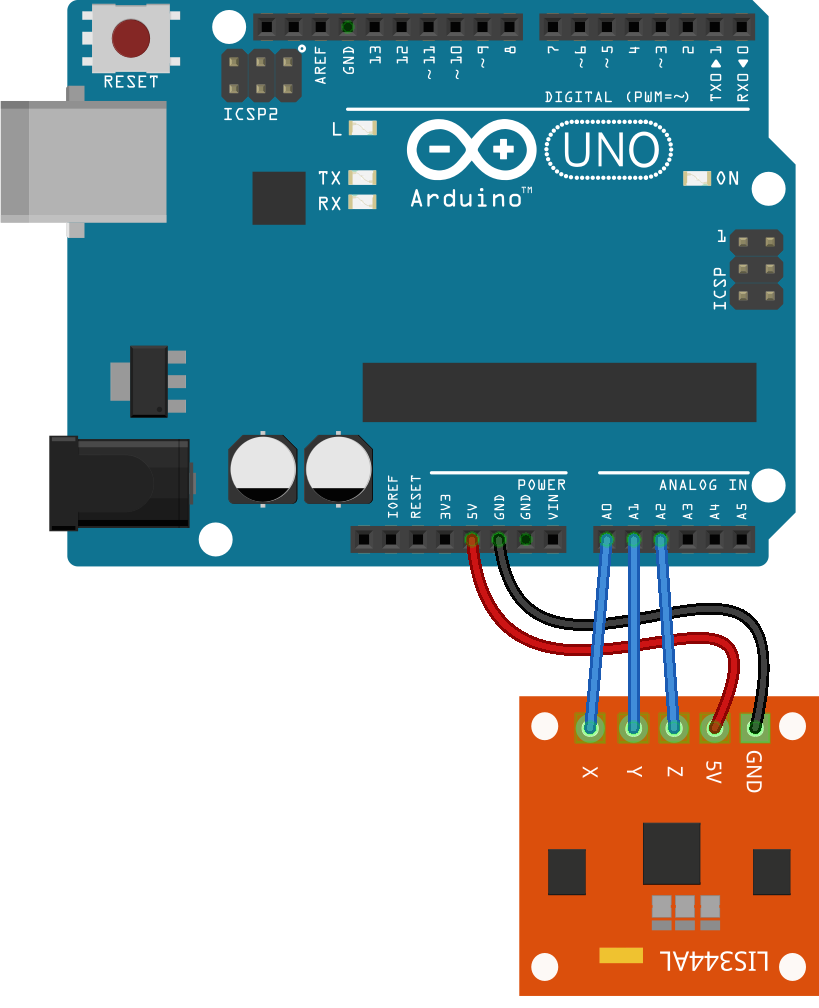
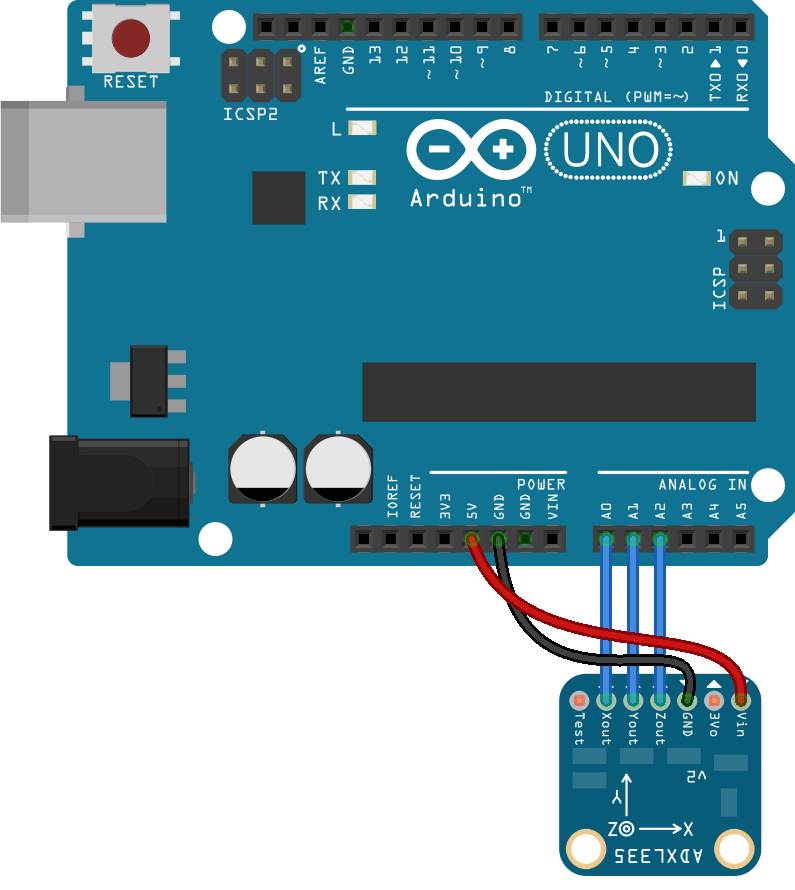
ADXL335
// Create an ADXL335 Accelerometer object:
//
// - attach Xout, Yout and Zout to A0, A1, A2
// - specify the ADXL335 controller
new five.Accelerometer({
controller: "ADXL335",
pins: ["A0", "A1", "A2"]
});
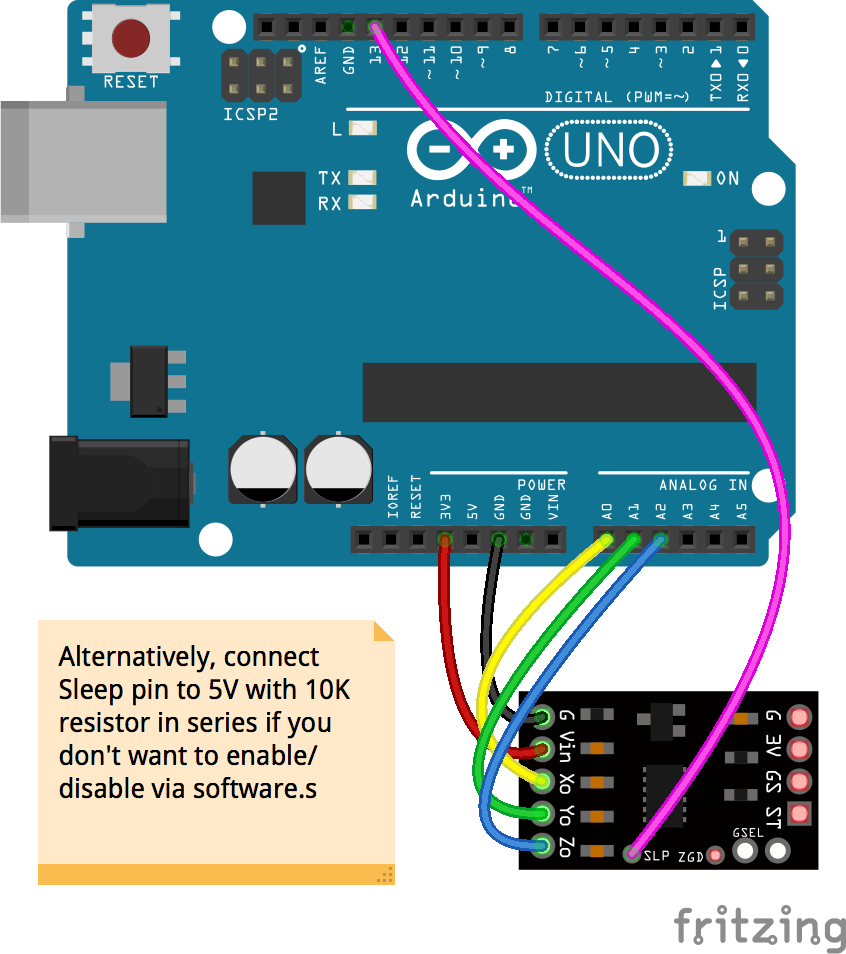
MMA7361
// Create an MMA7361 Accelerometer object:
//
// - attach Xo, Yo, and Zo to A0, A1, A2
// - specify the MMA7361 controller
// - optionally, specify the sleepPin
// - optionally, set it to auto-calibrate
// - optionally, set the zeroV values.
// This can be done when retrieving them
// after an autoCalibrate
new five.Accelerometer({
controller: "MMA7361",
pins: ["A0", "A1", "A2"],
sleepPin: 13,
autoCalibrate: true,
// override the zeroV values if you know what
// they are from a previous autoCalibrate
zeroV: [320, 365, 295]
});
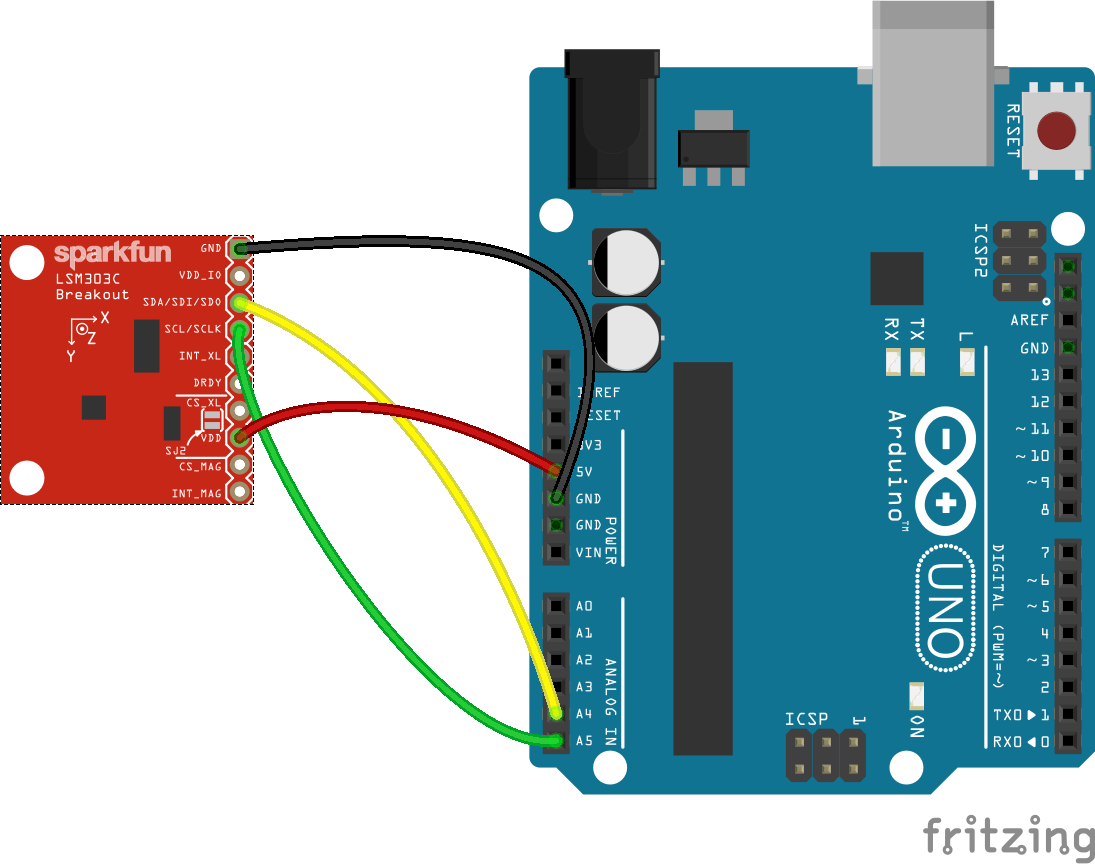
LSM303C
// Create an LSM303C Accelerometer object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the LSM303C controller
new five.Accelerometer({
controller: "LSM303C"
});
Usage
var five = require("johnny-five"),
board = new five.Board();
board.on("ready", function() {
var accelerometer = new five.Accelerometer({
pins: ["A0", "A1"]
});
accelerometer.on("change", function() {
console.log("X: %d", this.x);
console.log("Y: %d", this.y);
});
});
API
hasAxis(name) Does the device support the axis?
if (accelerometer.hasAxis("z")) { console.log(accelerometer.z) }enable() Enable the device and events (enabled by default). For devices that can be put to sleep (like the MMA7361), wake it up.
accelerometer.enable();disable() Disable the device and events. For devices that can be put to sleep (like the MMA7361), put it to sleep.
accelerometer.disable();
Events
change The "change" event is emitted whenever any reading changes.
data The "data" event is fired as frequently as measurements can be reported.
Examples
- IMU - LSM303C
- IMU - MPU6050
- IMU - BNO055
- Accelerometer
- Accelerometer - LIS3DH
- Accelerometer - MMA8452
- Accelerometer - ADXL345
- Accelerometer - ADXL335
- Accelerometer - MMA7361
- Accelerometer - MPU6050
- Accelerometer - Pan + Tilt
- Intel Edison + Grove - Accelerometer (ADXL345)
- Intel Edison + Grove - Accelerometer (MMA7660)
- Micro Magician V2 - Accelerometer
- TinkerKit - Accelerometer
- TinkerKit - Combo
