The Proximity class constructs an object that represents a single Proximity sensor.
Supported Proximity sensors:
- Pulse/PWM
- Ultrasonic (All use
controller: "HCSR04", Arduino boards require PingFirmata alternatively an HCSR04 backpack can be used to make the sensor I2C compatible.)- SR04 or HCSR04 *
- SRF05 *
- Parallax Ping *
- SeeedStudio Ultrasonic Range
- Grove - Ultrasonic Ranger *
- Hardware Constraints
- Range:
- Close: 0-2cm (will result in 2cm reading)
- Long: 2–400cm
- Resolution: ~0.3cm
- Range:
- Hardware Constraints
- RadioShack 2760342
- Ultrasonic (All use
- Analog
- Ultrasonic
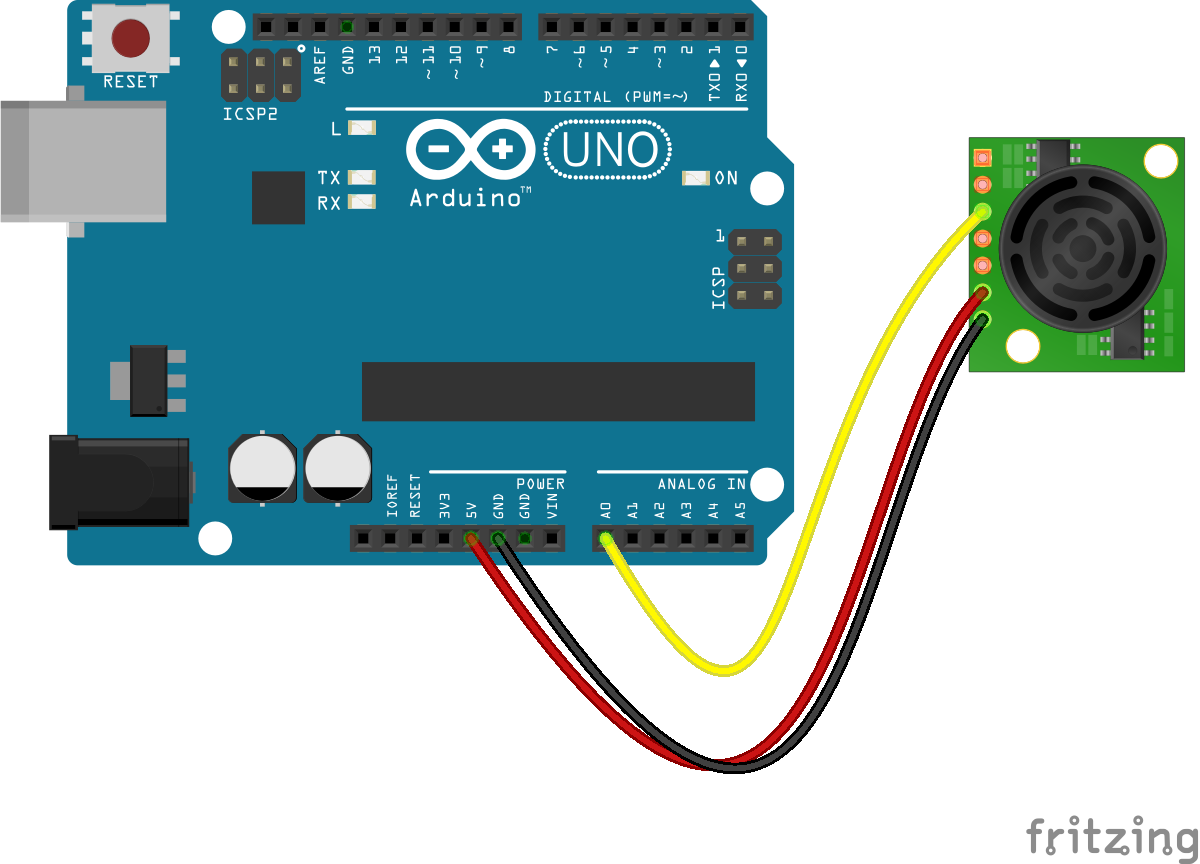
- MB1000, LV-MaxSonar-EZ0
- Hardware Constraints
- Range:
- Close: 0-15cm (will result in 15cm reading)
- Long: 15-645cm (15-50cm may experience acoustic phase cancellation)
- Resolution: 2.54cm
- Range:
- Likely supports the entire
LV-MaxSonar-EZ*line, additional sensors to be confirmed.
- Hardware Constraints
- MB1010, LV-MaxSonar-EZ1
- Hardware Constraints
- Range:
- Close: 0-15cm (will result in 15cm reading)
- Long: 15-645cm
- Resolution: 2.54cm
- Range:
- Hardware Constraints
- MB1003, HRLV-MaxSonar-EZ0
- Hardware Constraints
- Range:
- Close: 0-30cm (will result in 30cm reading)
- Long: 30-500cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- MB1230, XL-MaxSonar-EZ3
- Hardware Constraints
- Range:
- Close: 0-20cm (will result in 20cm reading)
- Long: 20-765cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- MB1000, LV-MaxSonar-EZ0
- Infrared
- GP2Y0A21YK
- Hardware Constraints
- Range:
- Close: 0-10cm (will result in 10cm reading)
- Long: 10-80cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- GP2D120XJ00F
- Hardware Constraints
- Range:
- Close: 0-4cm (will result in 4cm reading)
- Long: 4-30cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- GP2Y0A02YK0F
- Hardware Constraints
- Range:
- Close: 0-15cm (will result in 15cm reading)
- Long: 15-150cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- GP2Y0A41SK0F
- Hardware Constraints
- Range:
- Close: 0-4cm (will result in 4cm reading)
- Long: 4-30cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- GP2Y0A710K0F
- Hardware Constraints
- Range:
- Close: 0-50cm (will result in 50cm reading)
- Long: 50-500cm
- Resolution: 1cm
- Range:
- Hardware Constraints
- GP2Y0A21YK
- Ultrasonic
- I2C
- Lidar
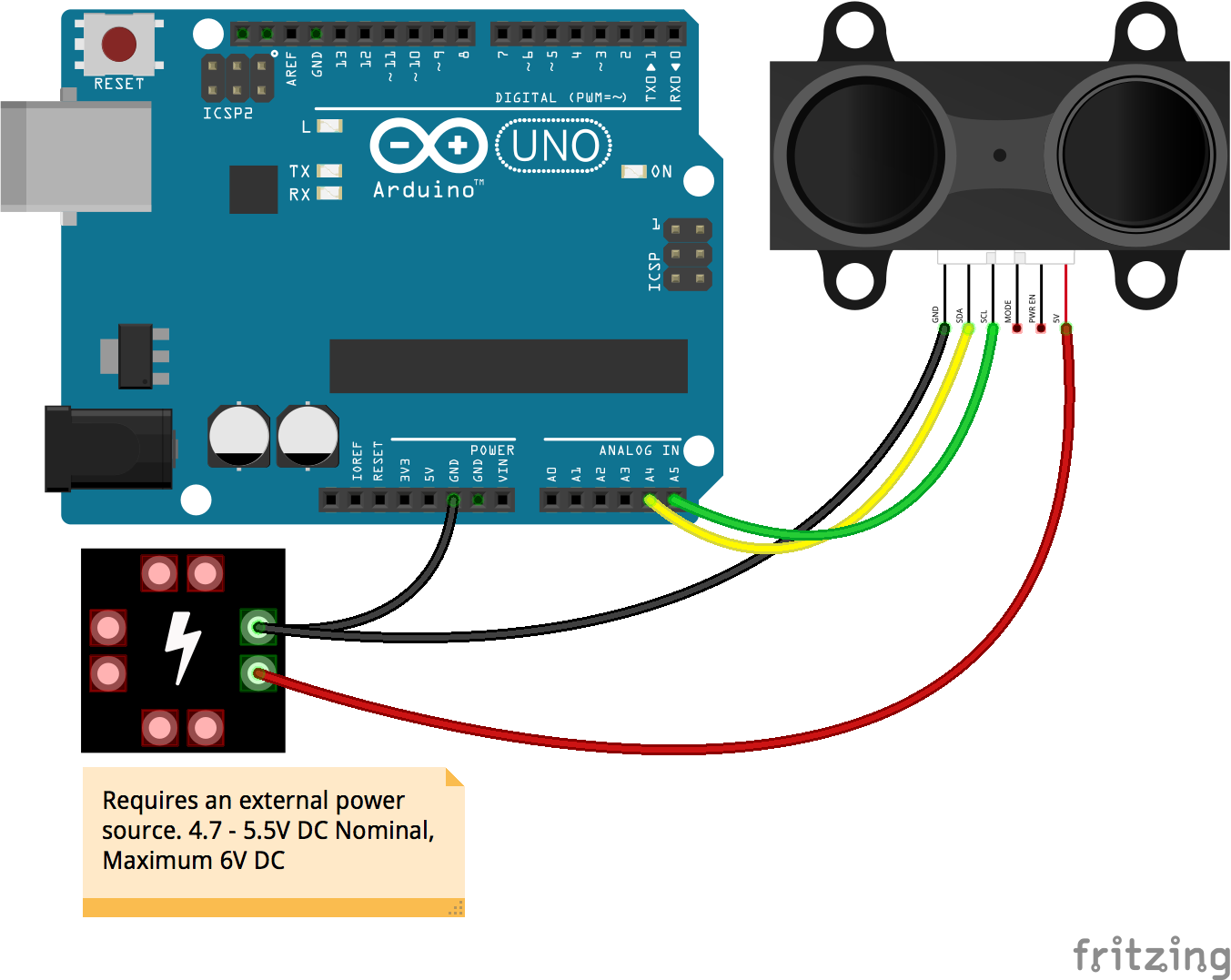
- LIDAR-Lite
- Hardware Constraints
- Range:
- Long: 0-4000cm
- Resolution: < 1cm
- Range:
- Hardware Constraints
- LIDAR-Lite
- Ultrasonic
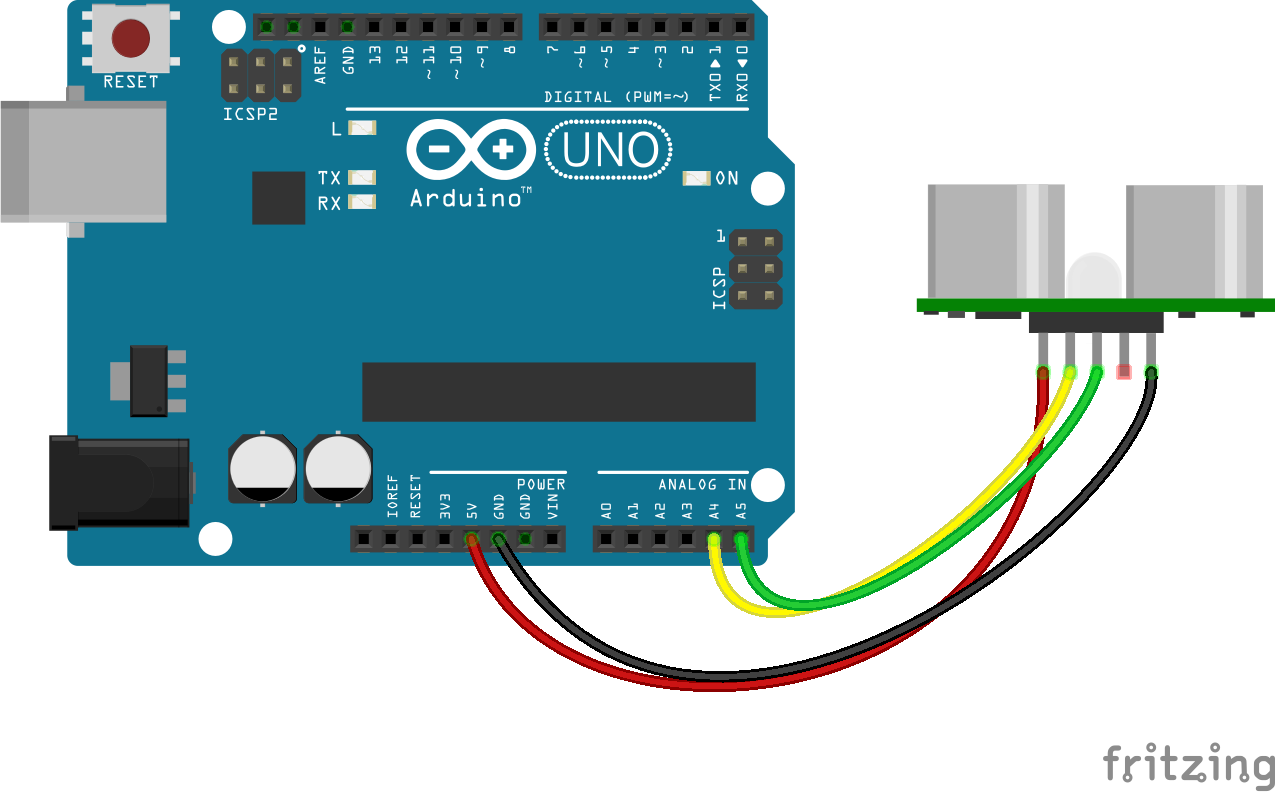
- SRF10
- Hardware Constraints
- Range:
- Close: 0-6cm (will result in 6cm reading)
- Long: 6-600cm
- Resolution: < 1cm
- Range:
- Hardware Constraints
- [HCSR04 (or similar see above) using and I2C backpack]
- Hardware Constraints
- Additional hardware:
- Requires addition of another board such as an Arduino Nano to provide the I2C support.
- Range:
- Close: 0-2cm (will result in 2cm reading)
- Long: 2-300cm
- Resolution: < 1cm
- Additional hardware:
- Hardware Constraints
- SRF10
- Lidar
Parameters
options An object of property parameters.
Property Type Value/Description Default Required pin Number, String Analog or Digital Pin. Use for non-I2C sensors Yes (non-I2C) controller String GP2Y0A21YK, GP2D120XJ00F, GP2Y0A02YK0F, GP2Y0A41SK0F, GP2Y0A710K0F, PING_PULSEIN *, MB1000, MB1003, MB1230, LIDARLITE. See aliases Yes freq Number Milliseconds. The frequency in ms of data events. 25ms No Controller Alias Table
Controller Alias GP2Y0A21YK 2Y0A21 GP2D120XJ00F 2D120X GP2Y0A02YK0F 2Y0A02 GP2Y0A41SK0F OA41SK GP2Y0A21YK 0A21 GP2Y0A02YK0F 0A02 LV-MaxSonar-EZ MB1000 HRLV-MaxSonar-EZ0 MB1003 XL-MaxSonar-EZ3 MB1230 HC-SR04 PING_PULSE_IN HCSR04 PING_PULSE_IN SRF05 PING_PULSE_IN PARALLAXPING PING_PULSE_IN SEEEDPING PING_PULSE_IN GROVEPING PING_PULSE_IN LIDAR-Lite LIDARLITE
Shape
| Property Name | Description | Read Only |
|---|---|---|
id | A user definable id value. Defaults to a generated uid | No |
cm | Distance to obstruction in centimeters. | Yes |
centimeters | Distance to obstruction in centimeters. | Yes |
in | Distance to obstruction in inches. | Yes |
inches | Distance to obstruction in inches. | Yes |
Component Initialization
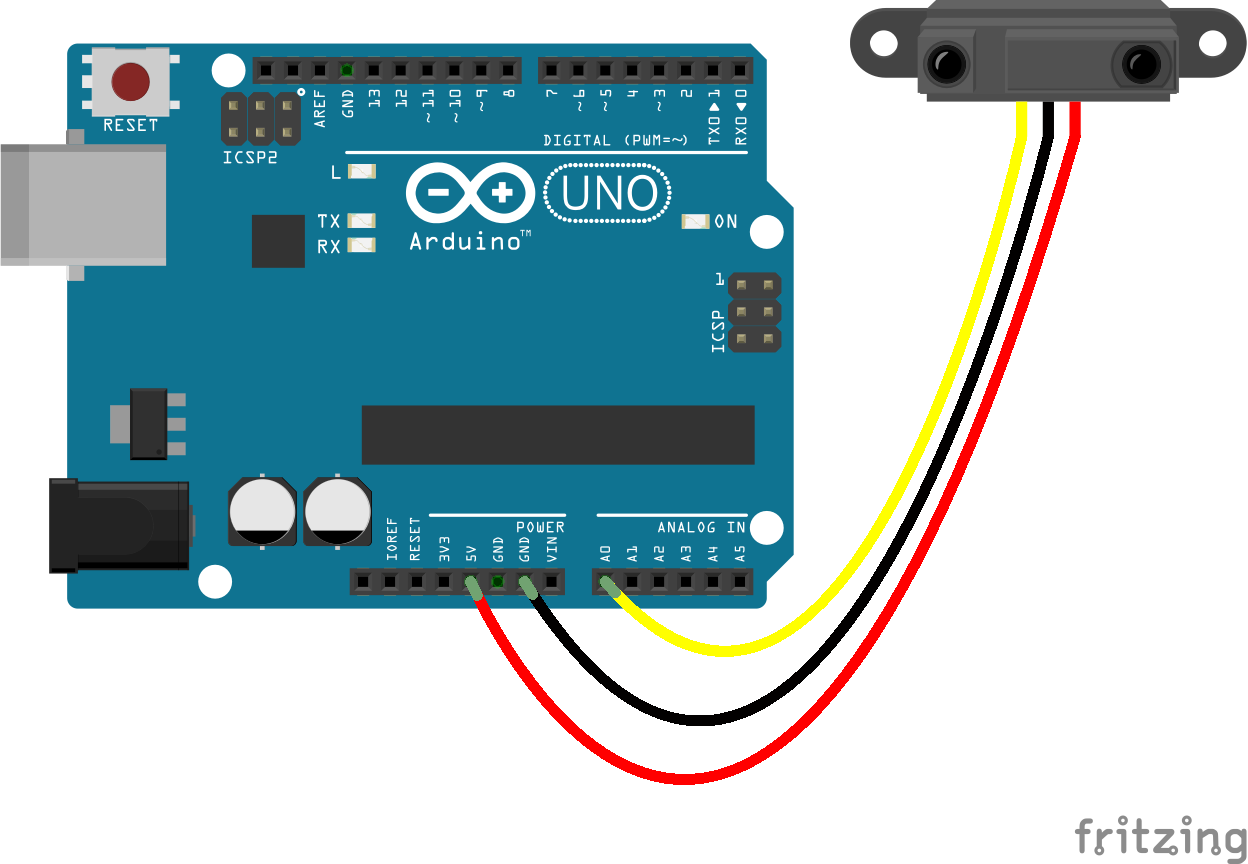
Analog GP2Y0A21YK (and friends)
/*
Use with:
- GP2Y0A21YK
- GP2D120XJ00F
- GP2Y0A02YK0F
- GP2Y0A41SK0F
*/
new five.Proximity({
controller: "GP2Y0A21YK",
pin: "A0"
});
Analog GP2Y0A710K0F
new five.Proximity({
controller: "GP2Y0A710K0F",
pin: "A0"
});
HCSR04/Parallax Ping *
new five.Proximity({
controller: "HCSR04",
pin: 7
});
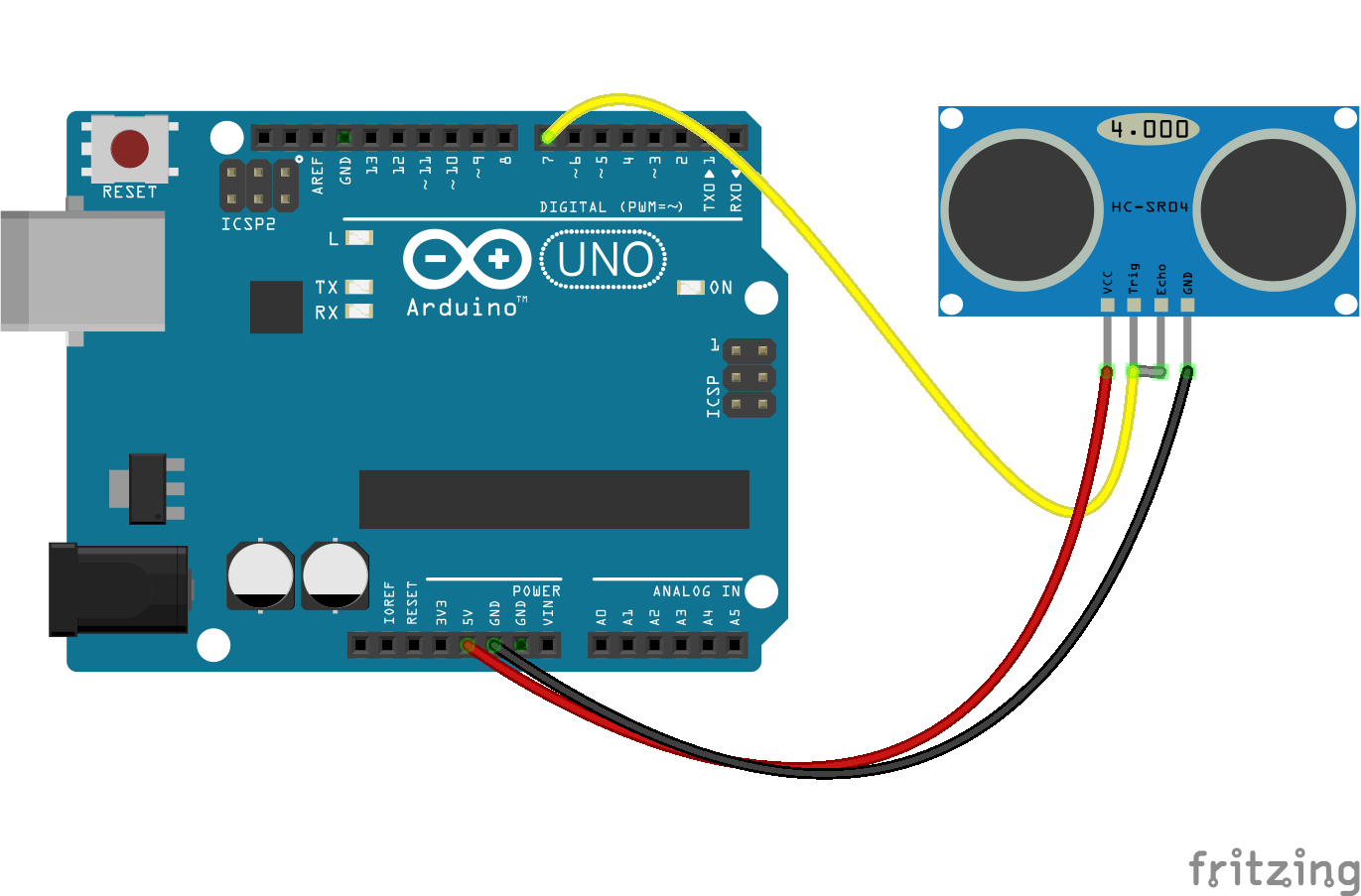
* For Arduino boards, it is absolutely REQUIRED to flash your board with a special version of StandardFirmata (PingFirmata). Instructions are here.
Alternatively also consider an I2C Backpack which will keep your firmata the same and allow you to use this sensor on alternative boards such as a Raspberry Pi, BeagleBone or other non-Arduino board.
HCSR04 (and friends) I2C Backpack *
new five.Proximity({
controller: "HCSR04I2CBACKPACK",
});
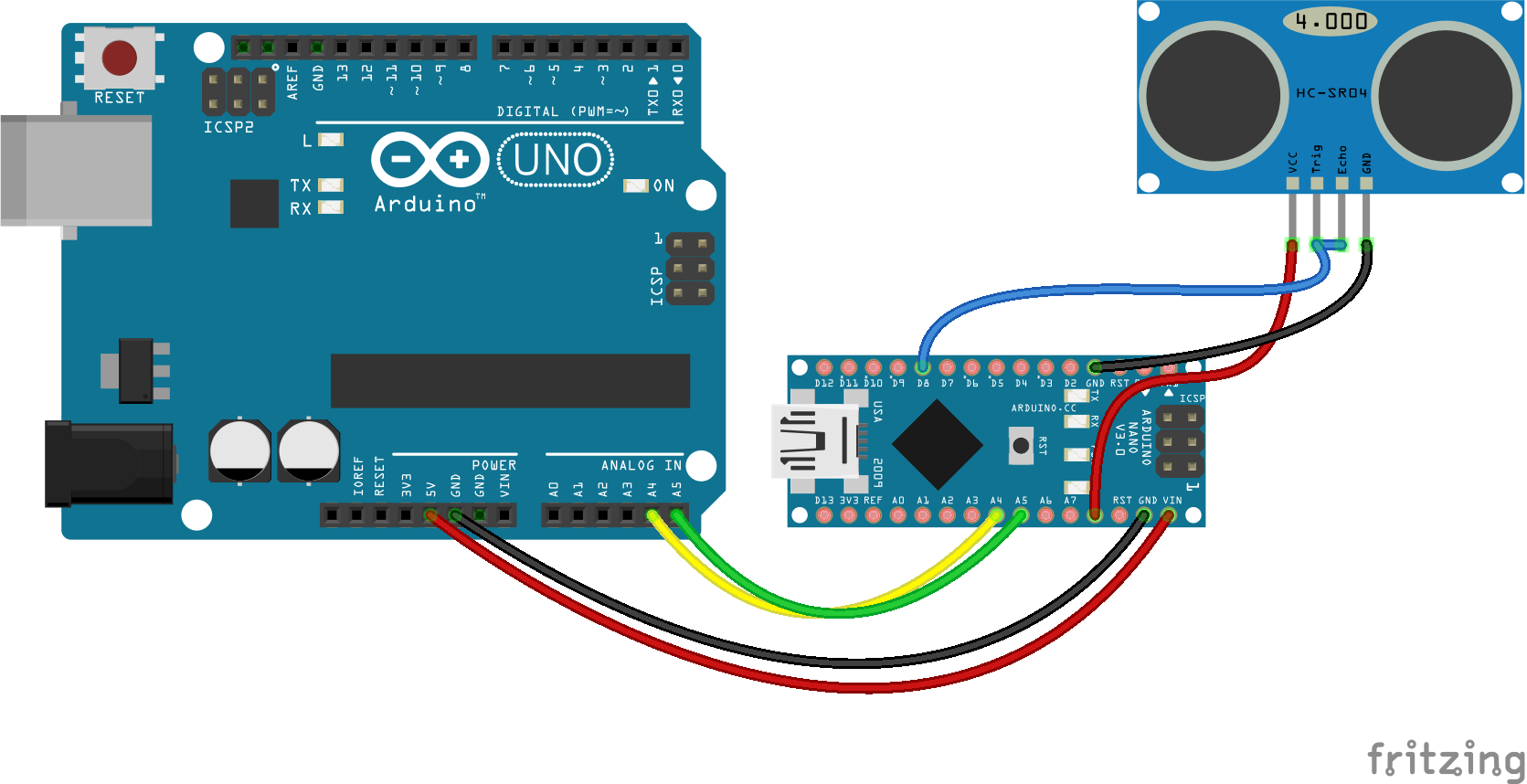
The I2C backpack requires using an Arduino (eg Nano or pro-mini) to provide the I2C capability. This removes the blocking behaviour of the PingFirmata firmware and makes this sensor more portable across alternative boards (anything that has I2C support in its IO plugin). See NodeBots Interchange HC-SR04 module for more details.
MB1000 LV-MaxSonar-EZ0
new five.Proximity({
controller: "MB1000",
pin: "A0"
});
MB1003 HRLV-MaxSonar-EZ0
new five.Proximity({
controller: "MB1003",
pin: "A0"
});
MB1230 XL-MaxSonar-EZ3
new five.Proximity({
controller: "MB1230",
pin: "A0"
});
LIDAR-Lite
new five.Proximity({
controller: "LIDARLITE"
});
SRF10
new five.Proximity({
controller: "SRF10"
});
Usage
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var proximity = new five.Proximity({
controller: ...,
pin: "A0"
});
proximity.on("data", function() {
console.log("inches: ", this.inches);
console.log("cm: ", this.cm);
});
});
API
within(range, unit, handler) When value is within the provided range for the specified unit (
cm,centimeters,inorinches), execute callback.var proximity = new five.Proximity({ controller: "GP2Y0A21YK", pin: "A0" }); proximity.within([ 100, 200 ], "cm", function() { // This is called when the proximity sensor's cm value falls within 100-200 });
Events
data The "data" event is fired as frequently as the user defined freq will allow in milliseconds.
change The "change" event is fired when the distance to obstruction reading changes within the observable range of the sensor.
PingFirmata
DOES NOT APPLY TO NON-ARDUINO PLATFORMS
For use with:
The above listed devices require a special version of Firmata (shown below) to be loaded onto the Arduino in order to function properly. This is only necessary for the components listed in this section!
The most straightforward method to enabling this module is to use the Ping I2C Backpack. If you still want / need to use a custom firmata then the easiest way to get the firmata onto your board is to use interchange. Follow the directions below:
npm install nodebots-interchange
With your arduino plugged in then issue the following instruction, where
interchange install hc-sr04 -a uno -p <port> --firmata
The latest firmware will be downloaded and installed upon your board.
The final alternative is to copy and paste the source into the Arduino IDE and click the Upload button.
Examples
- IR Proximity
- Proximity
- Proximity - GP2Y0A710K0F
- Proximity - SRF10
- Proximity - MB1000
- Proximity - MB1010
- Proximity - MB1003
- Proximity - MB1230
- Proximity - HC-SR04
- Proximity - HC-SR04 (Analog)
- Proximity - HC-SR04 I2C Backpack
- Proximity - LIDAR-Lite
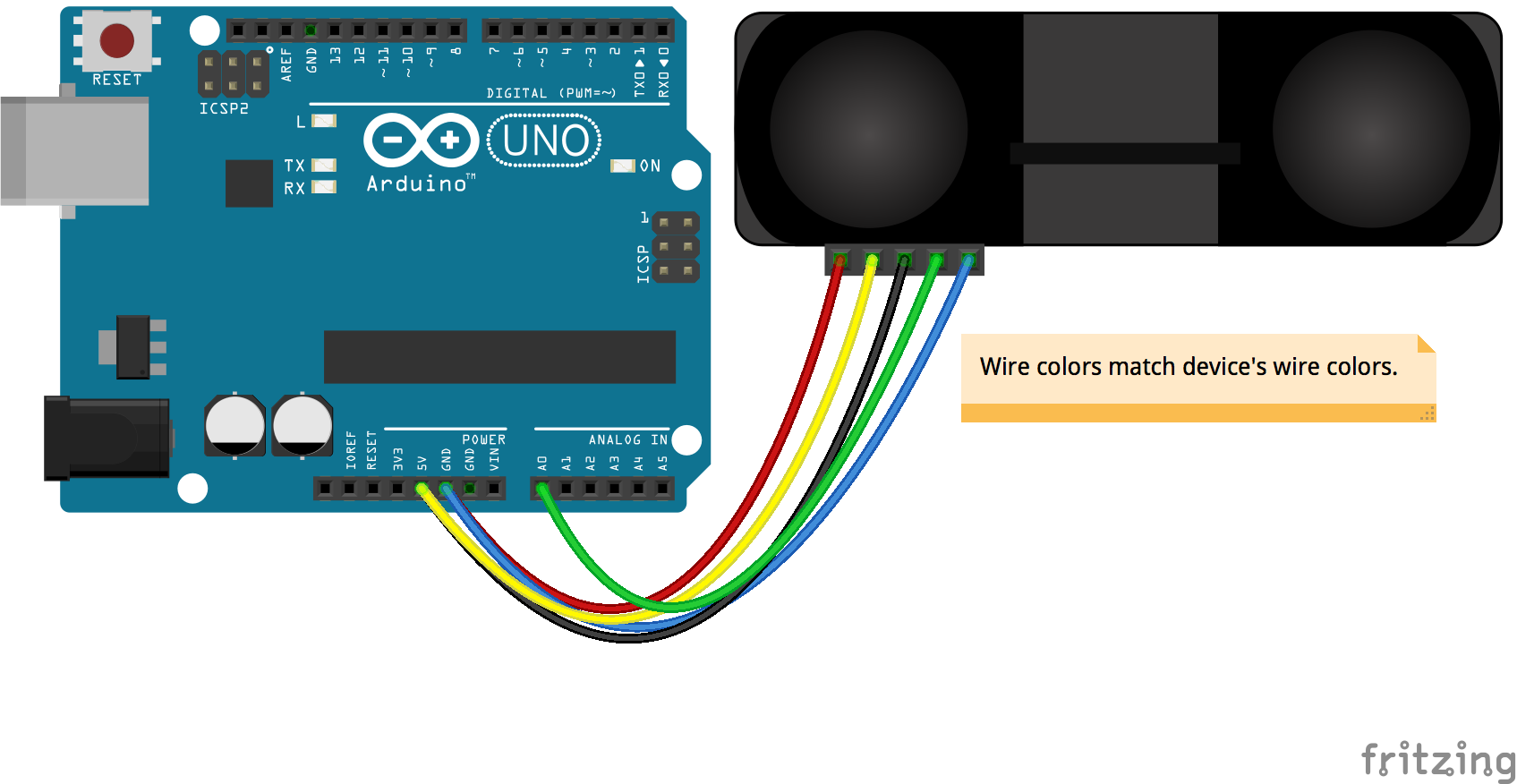
- Proximity - EVShield EV3 (IR)
- Proximity - EVShield EV3 (Ultrasonic)
- Proximity - EVShield EV3 (IR)
- Proximity - EVShield EV3 (Ultrasonic)
