The Stepper class constructs objects that represent a single stepper motor attached to the physical board. This class is new and should be considered unstable.
In order to use the Stepper class, your board must be flashed with AdvancedFirmata, which is available here: https://github.com/soundanalogous/AdvancedFirmata
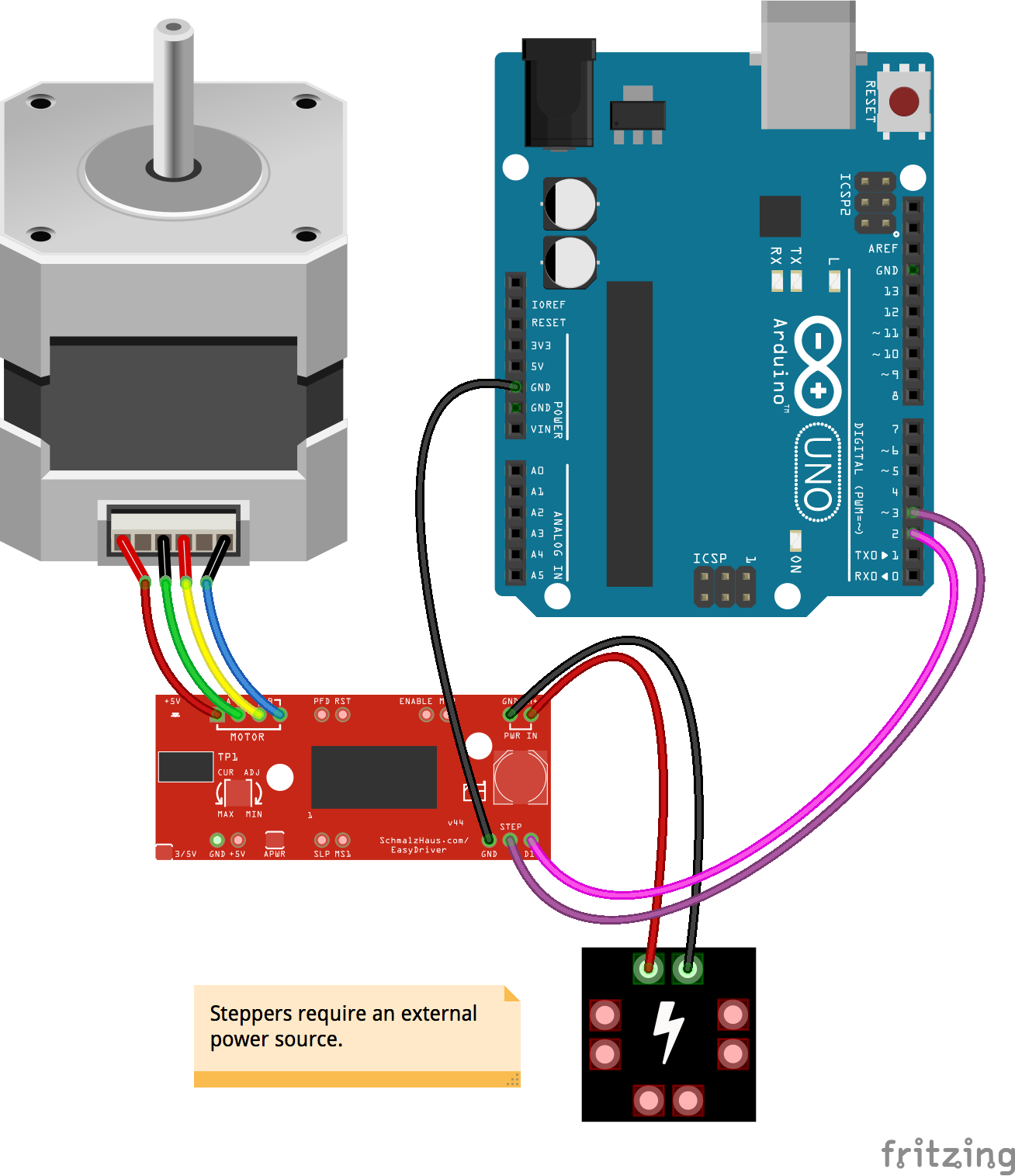
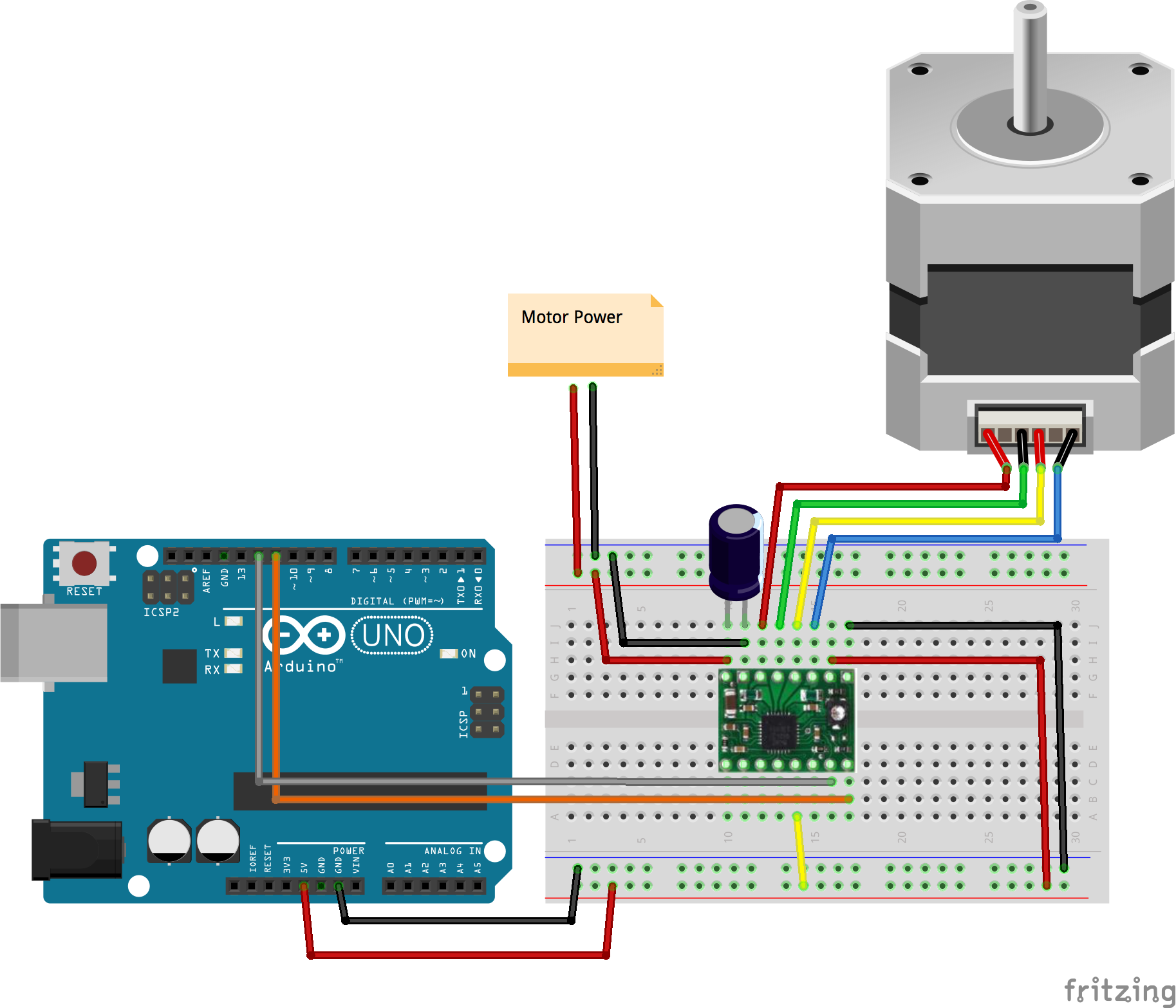
Stepper motors generally require significantly involved hardware setup (that is, more than just plugging a single lead into a pin).
Parameters
options An object of property parameters.
Property Type Value/Description Default Required pins Object * See Table. An object containing the named pin addresses for the 3 supported types yes * pins Array * See Table. An array containing the pin addresses for the 3 supported types yes1 stepsPerRev Number Steps per revolution. This will differ by motor, refer to motor specs for value yes type constant five.Stepper.TYPE.DRIVER,five.Stepper.TYPE.TWO_WIRE,five.Stepper.TYPE.FOUR_WIREyes rpm Number Revolutions per minute, used to calculate speed. 180 no direction constant five.Stepper.DIRECTION.CW,five.Stepper.DIRECTION.CCWno2
Pins
| Config | As Object | As Array |
|---|---|---|
| DRIVER | { step, dir } | [ step, dir ] |
| TWO_WIRE | { m1, m2 } | [ m1, m2 ] |
| FOUR_WIRE | { m1, m2, m3, m4 } | [ m1, m2, m3, m4 ] |
- The pins property is required, but can be EITHER an object or an array.
- The direction property is not required, but if it is undefined then Stepper.step() will do nothing.
Shape
{
id: A user definable id value. Defaults to a generated uid
pins: Object containing the pin addresses for the Stepper
rpm: Revolutions per minute, used to calculate speed. Defaluts to 180
direction:
speed:
accel:
decel:
}
Component Initialization
Driver
// Create a stepper motor
//
// - Step on pin 11
// - Direction on pin 12
// - Steps per revolution: 200
// - Uses a Driver board
//
new five.Stepper({
type: five.Stepper.TYPE.DRIVER,
stepsPerRev: 200,
pins: [ 11, 12 ]
});
// Is the same as...
five.Stepper({
type: five.Stepper.TYPE.DRIVER
stepsPerRev: 200,
pins: {
step: 11
dir: 12
}
});
five.Stepper({
type: five.Stepper.TYPE.DRIVER
stepsPerRev: number,
pins: {
step: number
dir: number
}
});
five.Stepper({
type: five.Stepper.TYPE.DRIVER
stepsPerRev: number,
pins: [ step, dir ]
});
TWO WIRE
five.Stepper({
type: five.Stepper.TYPE.TWO_WIRE
stepsPerRev: number,
pins: {
motor1: number,
motor2: number
}
});
five.Stepper({
type: five.Stepper.TYPE.TWO_WIRE
stepsPerRev: number,
pins: [ motor1, motor2 ]
});
FOUR WIRE
five.Stepper({
type: five.Stepper.TYPE.FOUR_WIRE
stepsPerRev: number,
pins: {
motor1: number,
motor2: number,
motor3: number,
motor4: number
}
});
five.Stepper({
type: five.Stepper.TYPE.FOUR_WIRE
stepsPerRev: number,
pins: [ motor1, motor2, motor3, motor4 ]
});
Usage
var board = new five.Board();
board.on("ready", function() {
var k = 0;
var stepper = new five.Stepper({
type: five.Stepper.TYPE.DRIVER,
stepsPerRev: 200,
pins: [11, 12]
});
stepper.rpm(180).ccw().step(2000, function() {
console.log("done");
});
});
API
step(stepsOrOpts, callback) Move a stepper motor.
// stepsOrOpts { steps: number of steps to move direction: 1, 0 (CCW, CW) rpm: Revolutions per minute. Defaults to 180 accel: Number of steps to accelerate decel: Number of steps to decelerate } // // - 10 full revolutions // - Clockwise // - Accelerate over the first 1600 steps // - Decelerate over the last 1600 steps // stepper.step({ steps: 2000, direction: 1, accel: 1600, decel: 1600 }, function() { console.log("Done stepping!"); });rpm() Get the rpm.
rpm(value) Set the rpm.
stepper.rpm(180).step(2000, function() { console.log("Done stepping!"); });speed() Get the speed.
speed(value) Set the speed in
0.01 * rad/s.// 180 rpm stepper.speed(0.18850).step(2000, function() { console.log("Done stepping!"); });direction() Get the direction.
direction(value) Set the direction.
stepper.direction(1).step(2000, function() { console.log("Done stepping!"); }); stepper.direction(0).step(2000, function() { console.log("Done stepping!"); });Or...
stepper.direction(five.Stepper.DIRECTION.CW).step(2000, function() { console.log("Done stepping!"); }); stepper.direction(five.Stepper.DIRECTION.CCW).step(2000, function() { console.log("Done stepping!"); });accel() Get the acceleration.
accel(value) Set the acceleration.
stepper.accel(1600).step(2000, function() { console.log("Done stepping!"); });decel() Get the deceleration.
decel(value) Set the deceleration.
stepper.decel(1600).step(2000, function() { console.log("Done stepping!"); });cw() Set the Stepper to move Clockwise.
stepper.cw().step(2000);ccw() Set the Stepper to move Counter-Clockwise.
stepper.ccw().step(2000);
Static
Types
| Type | Value | Constant |
|---|---|---|
| DRIVER | 1 | Stepper.TYPE.DRIVER |
| DRIVER | 2 | Stepper.TYPE.TWO_WIRE |
| DRIVER | 4 | Stepper.TYPE.FOUR_WIRE |
Run States
| State | Value | Constant |
|---|---|---|
| STOP | 0 | Stepper.RUNSTATE.STOP |
| DRIVE | 1 | Stepper.RUNSTATE.ACCEL |
| DRIVE | 2 | Stepper.RUNSTATE.DECEL |
| DRIVE | 3 | Stepper.RUNSTATE.RUN |
Directions
| Direction | Value | Constant |
|---|---|---|
| CCW | 0 | Stepper.DIRECTION.CCW |
| CW | 1 | Stepper.DIRECTION.CW |
