Run this example from the command line with:
node eg/motobot.js
const {Board, Motor, Fn} = require("johnny-five");
const keypress = require("keypress");
const board = new Board();
board.on("ready", () => {
let speed = 100;
let commands = null;
const motors = {
a: new Motor([3, 12]),
b: new Motor([11, 13])
};
board.repl.inject({
motors
});
function controller(ch, key) {
if (key) {
if (key.name === "space") {
motors.a.stop();
motors.b.stop();
}
if (key.name === "up") {
motors.a.rev(speed);
motors.b.fwd(speed);
}
if (key.name === "down") {
motors.a.fwd(speed);
motors.b.rev(speed);
}
if (key.name === "right") {
motors.a.fwd(speed * 0.75);
motors.b.fwd(speed * 0.75);
}
if (key.name === "left") {
motors.a.rev(speed * 0.75);
motors.b.rev(speed * 0.75);
}
commands = Array.from(arguments);
} else {
if (ch >= 1 && ch <= 9) {
speed = Fn.scale(ch, 1, 9, 0, 255);
controller(...commands);
}
}
}
keypress(process.stdin);
process.stdin.on("keypress", controller);
process.stdin.setRawMode(true);
process.stdin.resume();
});
Illustrations / Photos
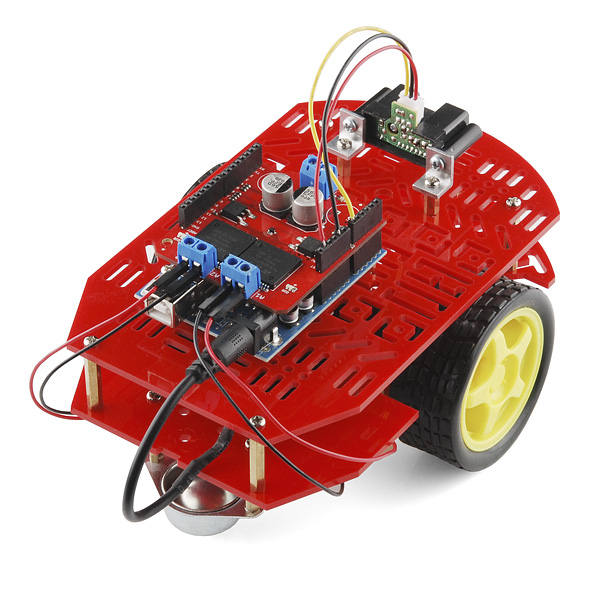
Complete Motobot
Typical complete Motobot platform
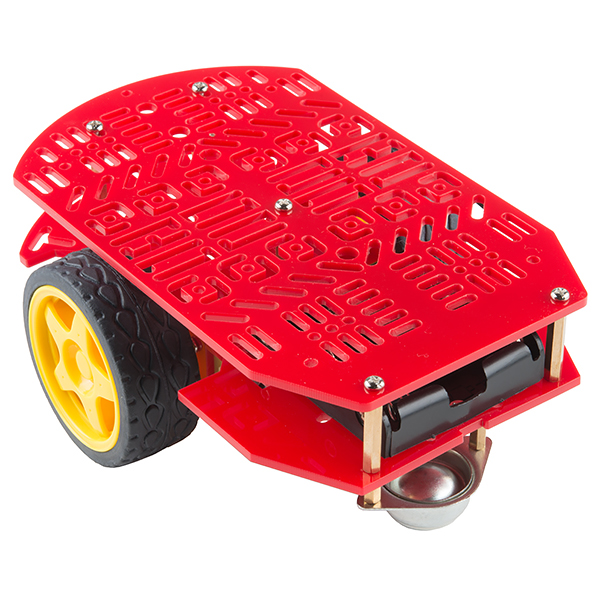
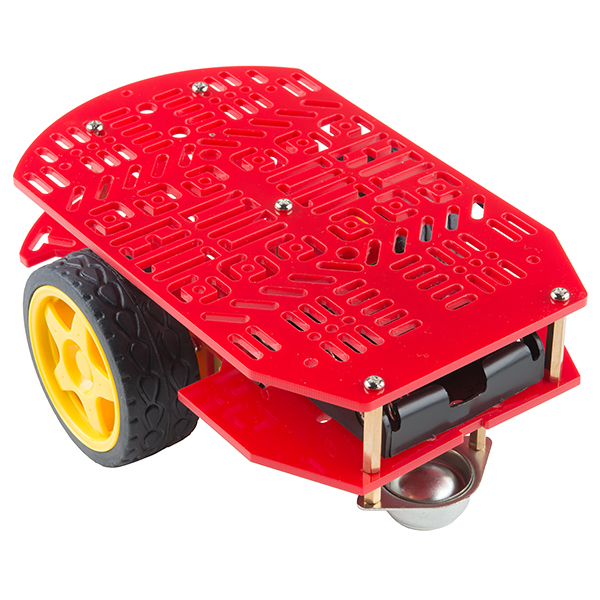
Motobot chassis
Motobot chassis before addings
Additional Notes