Breadboard for "Motors - Dual H-Bridge"
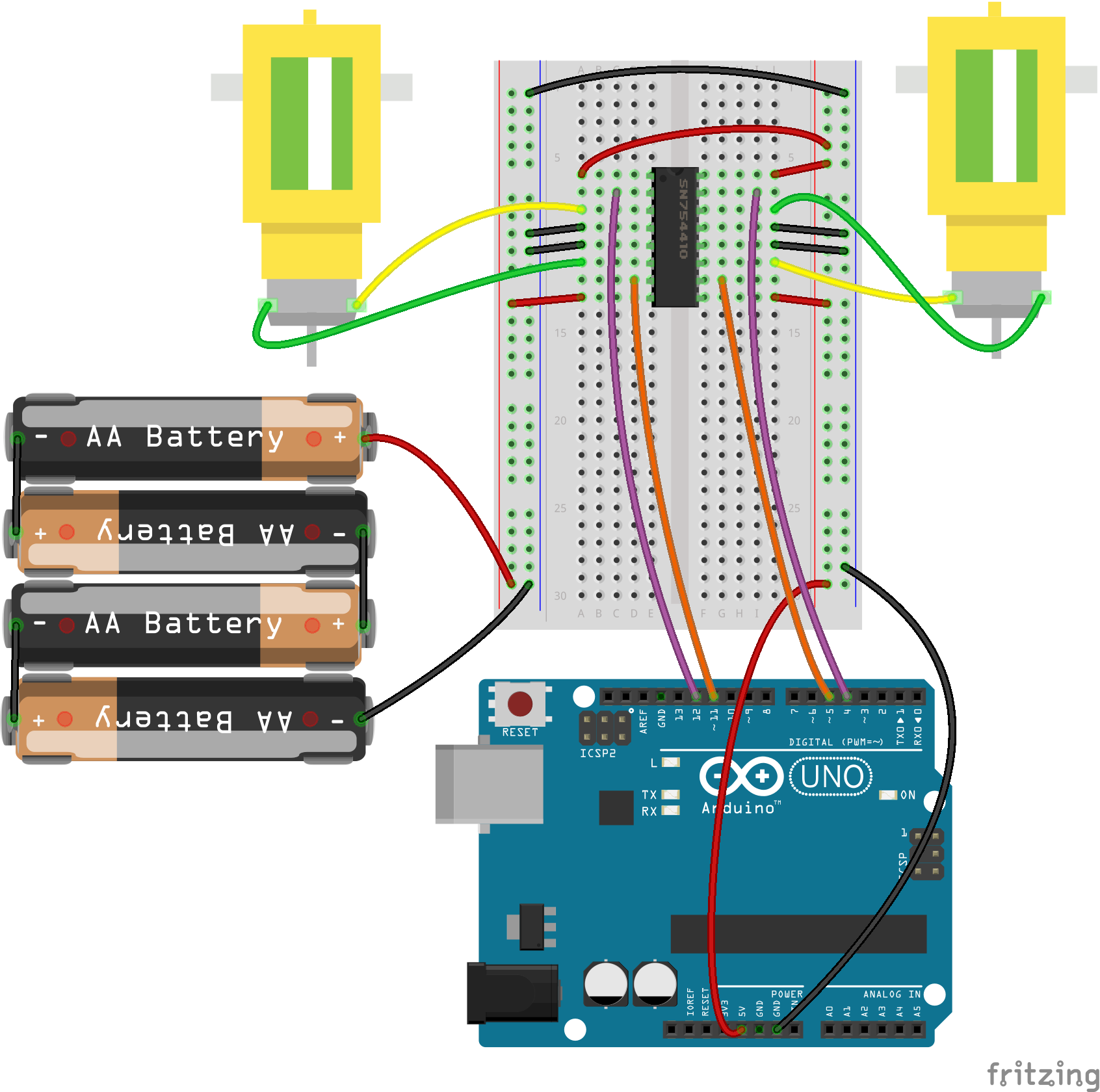
Fritzing diagram: motor-hbridge-dual.fzz
Run this example from the command line with:
node eg/motor-hbridge-dual.js
/**
* This example is intended for dual H-bridge (quad half H-bridge) motor
* driver ICs, like the Texas Instruments SN754410. It isn't intended for
* motor driver breakout boards or more sophisticated drivers, which handle
* the PWM inversion for you.
*/
const {Board, Motors} = require("johnny-five");
const board = new Board();
const invertPWM = true;
board.on("ready", () => {
/**
* Motor A: PWM 11, dir 12
* Motor B: PWM 5, dir 4
*/
const motors = new Motors([
{ pins: { dir: 12, pwm: 11 }, invertPWM },
{ pins: { dir: 4, pwm: 5}, invertPWM }
]);
board.repl.inject({
motors
});
// Go forward at full speed for 5 seconds
console.log("Full speed ahead!");
motors.forward(255);
board.wait(4900, motors.stop);
// Go backwards at full speed for 5 seconds
board.wait(5000, () => {
console.log("Now backwards!");
motors.reverse(255);
board.wait(4900, motors.stop);
});
// Go left...
board.wait(10000, () => {
console.log("To the left!");
motors[0].reverse(200);
motors[1].forward(200);
board.wait(4900, motors.stop);
});
// Go right...
board.wait(15000, () => {
console.log("To the right!");
motors[0].forward(200);
motors[1].reverse(200);
board.wait(4900, motors.stop);
});
// Use REPL if you want to go further
board.wait(20000, () => console.log("Done auto-driving! Use `motors` to control motors in REPL"));
});
