Breadboard for "Servo"
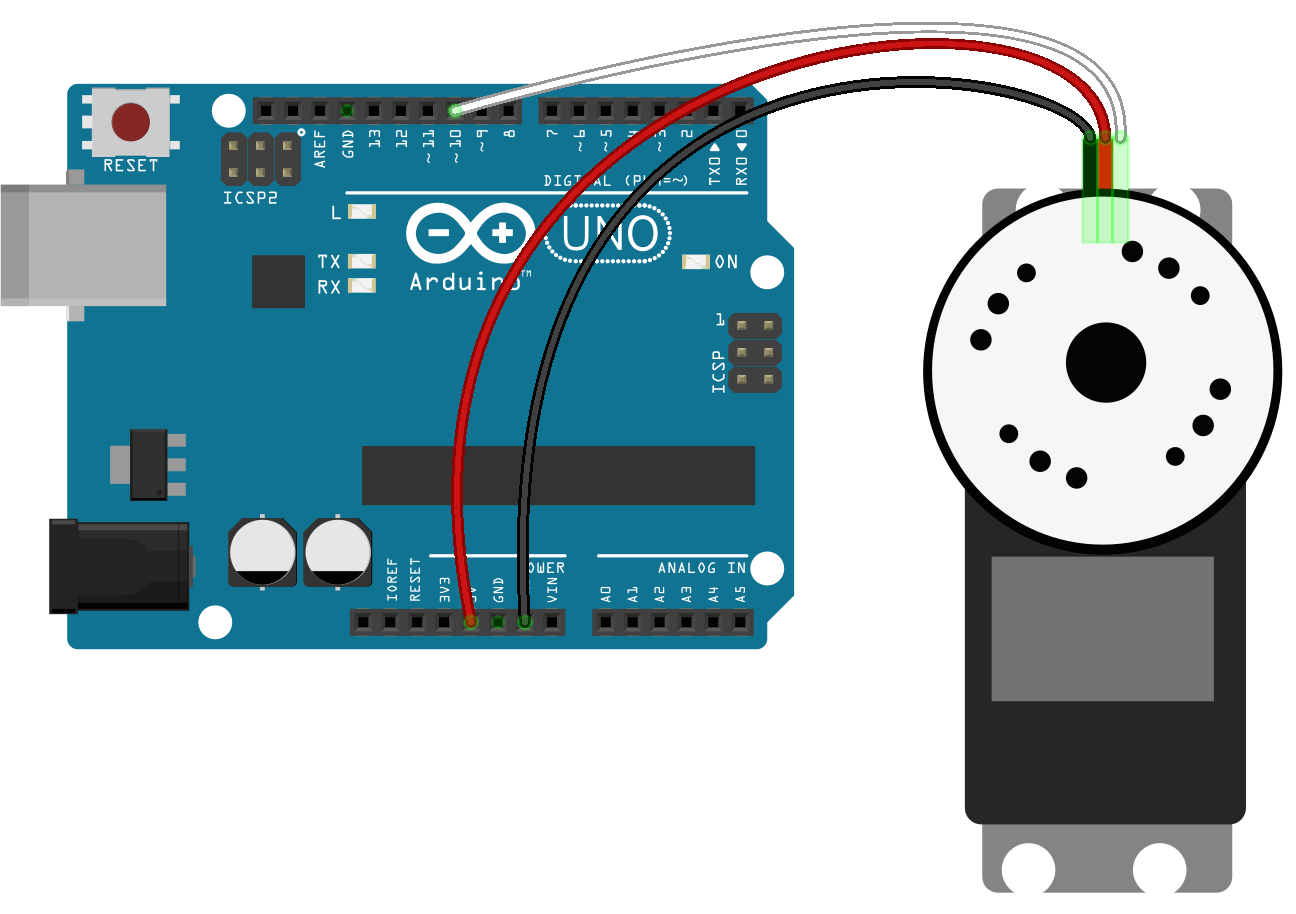
Fritzing diagram: servo.fzz
Run this example from the command line with:
node eg/servo.js
const {Board, Servo} = require("johnny-five");
const board = new Board();
board.on("ready", () => {
const servo = new Servo(10);
// Servo alternate constructor with options
/*
var servo = new five.Servo({
id: "MyServo", // User defined id
pin: 10, // Which pin is it attached to?
type: "standard", // Default: "standard". Use "continuous" for continuous rotation servos
range: [0,180], // Default: 0-180
fps: 100, // Used to calculate rate of movement between positions
invert: false, // Invert all specified positions
startAt: 90, // Immediately move to a degree
center: true, // overrides startAt if true and moves the servo to the center of the range
});
*/
// Add servo to REPL (optional)
board.repl.inject({
servo
});
// Servo API
// min()
//
// set the servo to the minimum degrees
// defaults to 0
//
// eg. servo.min();
// max()
//
// set the servo to the maximum degrees
// defaults to 180
//
// eg. servo.max();
// center()
//
// centers the servo to 90°
//
// servo.center();
// to( deg )
//
// Moves the servo to position by degrees
//
// servo.to( 90 );
// step( deg )
//
// step all servos by deg
//
// eg. array.step( -20 );
servo.sweep();
});
